- 位置比较需要先设置模式,输出时间,输出IO等配置
- 硬件缓冲区最多14个(X控制器)-32个(T控制器),比较值分别是12位和30位宽度
- 软件缓冲区支持数量:511
- 二维门限计算:
例如设置触发位置 X:Y,实际触发位置X1:Y1,门限=(X-X1)² + (Y-Y1)²
如目标位置和实际位置误差20,门限则设置20,软件内部已开平方(20²=400) - 需把编码器进行接线并在软件上启动
| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
本节主要介绍内容如下:
| 注意 | |
| |
|
相关函数 |
||||||||||||
 |
||||||||||||
|
| 注意 | |
| |
|
运动说明 |
|
 |
|
比较值数据顺序需与轴运动时编码器的变化方向对应,比较值顺序执行,只有当前比较值判定比较成功后,才会比较下一个值。 1.固定位置模式 2.线性位置模式 3.先进先出模式 停止比较器时会将硬件、软件缓冲区,头尾指针清零 。 |
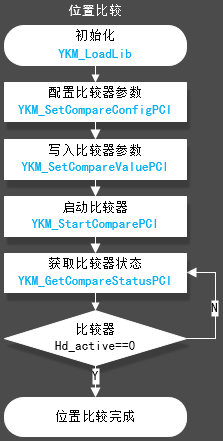
流程图 |
|
 |
|
|
程序编写 |
|
 |
|
//以固定位置模式为例 RetCode result; //库加载 //位置比较设置配置参数 compareConfig.ena_bit0 = 1; compareConfig.enable_2d = 0; //设置比较数据 //启动位置比较 //判断比较是否完成 //停止位置比较 |
常见问题及说明 |
|
 |
|
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |