RetCode result;
int exit_cmd = 0;
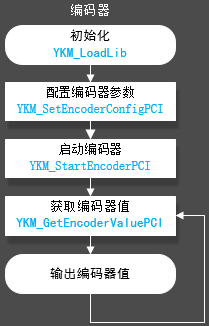
//库加载
result = YKM_LoadLib();
YKM_BusInfo busInfo;
//等待系统初始化完成
while (!exit_cmd)
{
result = YKM_GetBusInfo(&busInfo);
if (busInfo.running)
break;
Sleep(100);
}
//设置编码器配置
YKM_EncoderConfig encoderConfig;
memset(&encoderConfig, 0, sizeof(YKM_EncoderConfig));
encoderConfig.mode = YKM_ENCODER_MODE::ENCODER_MODE_AB4;
encoderConfig.polarityA = 0;
encoderConfig.polarityB = 0;
result = YKM_SetEncoderConfigPCI(cardIndex, channel, encoderConfig);
//启动编码器
result = YKM_StartEncoderPCI(cardIndex, channel,);
//获取编码器的值
while (!exit_cmd)
{
result = YKM_GetEncoderValuePCI(cardIndex, channel, &value);
Sleep(10);
}
|