相关函数

| YKM_StartProbe | 启动探针 |
| YKM_StopProbe | 停止探针 |
| YKM_GetProbeStatus | 获取探针状态以及值 |
| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
本节主要介绍内容如下:
相关函数 |
||||||
| |
||||||
|
运动说明 |
|
 |
|
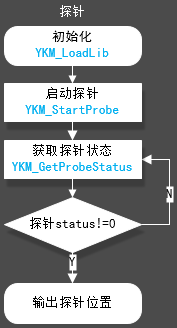
探针功能是指从外部输入或者是Z相选择箝位触发信号,锁定反馈位置。 |
流程图 |
|
 |
|
|
程序编写 |
|
 |
|
| RetCode result; |
常见问题及说明 |
|
 |
|
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |