|
RetCode result;
int exit_cmd = 0;
//库加载
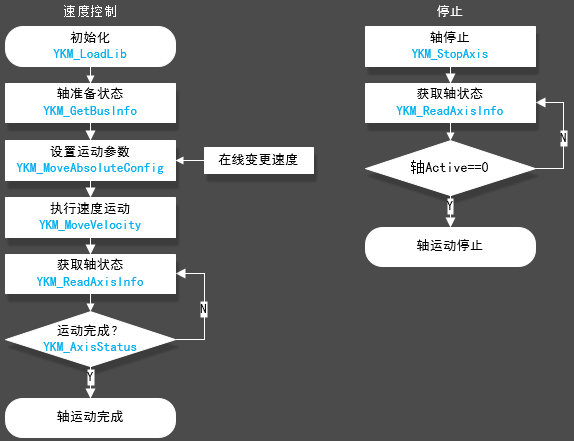
result = YKM_LoadLib();
YKM_BusInfo busInfo;
//等待系统初始化完成
while (!exit_cmd)
{
result = YKM_GetBusInfo(&busInfo);
if (busInfo.running)
break;
Sleep(100);
}
//参数配置
YKM_MoveVelocityConfig velConfig;
velConfig.direction = YKM_DIRECTION_POSITIVE;
velConfig.velocity = 1000;
velConfig.acceleration = 1000;
velConfig.deceleration = 1000;
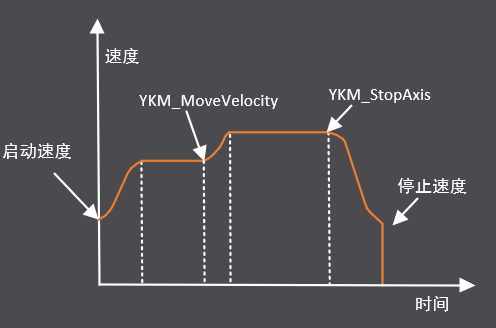
velConfig.jerk = 10000;//启动速度运动
result =YKM_MoveVelocity(axisIndex, velConfig);
//运动一段时间
Sleep(1000);
//轴停止
result = YKM_StopAxis(axisIndex, 0);
//等待轴减速停止
YKM_AxisStatus status;
while (!exit_cmd)
{
result = YKM_ReadAxisInfo(axisIndex, &status);
if (0 == status.Active)
break;
Sleep(1);
} |