第一步:实时系统安装和配置
运行ProR软件,你将会看到任务栏右下角显示一个ProR控制台的小图标,右击图标, 如下图所示
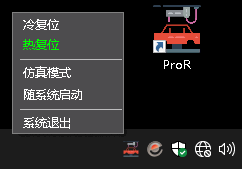
仿真模式:软件默认运行在实时系统下,如果没有安装实时系统,则可选择仿真模式,即代表在Windows系统下运行,则可不用安装实时系统,可直接跳到第四步,但是此模式仅用于程序调试,不能连接实物
这里是推荐在实时系统下运行,因为实时系统能够提供更好的稳定性和实时性
实时系统的安装和授权教程详情请见:实时系统安装和配置
| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
为了让用户更快的熟悉软件的使用流程,本节将通过一个如何实现单轴运动的例子,来介绍软件的使用流程
总共分为以下几步
运行ProR软件,你将会看到任务栏右下角显示一个ProR控制台的小图标,右击图标, 如下图所示
仿真模式:软件默认运行在实时系统下,如果没有安装实时系统,则可选择仿真模式,即代表在Windows系统下运行,则可不用安装实时系统,可直接跳到第四步,但是此模式仅用于程序调试,不能连接实物
这里是推荐在实时系统下运行,因为实时系统能够提供更好的稳定性和实时性
实时系统的安装和授权教程详情请见:实时系统安装和配置
ProCon软件的安装教程请点击这里:ProCon安装教程
ProCon软件安装好后,应该包含两个软件,一个是配置和调试软件ProEn,一个是后台运行软件ProR
此时我们运行ProR对软件进行授权,ProR的详细功能介绍和软件授权流程详情请见:RuntimeProR说明
完成以上安装和授权步骤后,需要对正在使用的这台工控机进行实时性和同步性的性能评估,这将影响接下来的单轴运动实现效果。如果当前进行测试的机器不是工控机,为自用的笔记本电脑或者普通自用的计算机,只是为了做简单的测试,则可跳过这一步。当然不进行工控机的实时性和同步性评估也可以实现接下来的单轴运动,但是运动的高实时性和高同步性的效果可能不会达到。工控机实时性和同步性评估参考:选配工控机
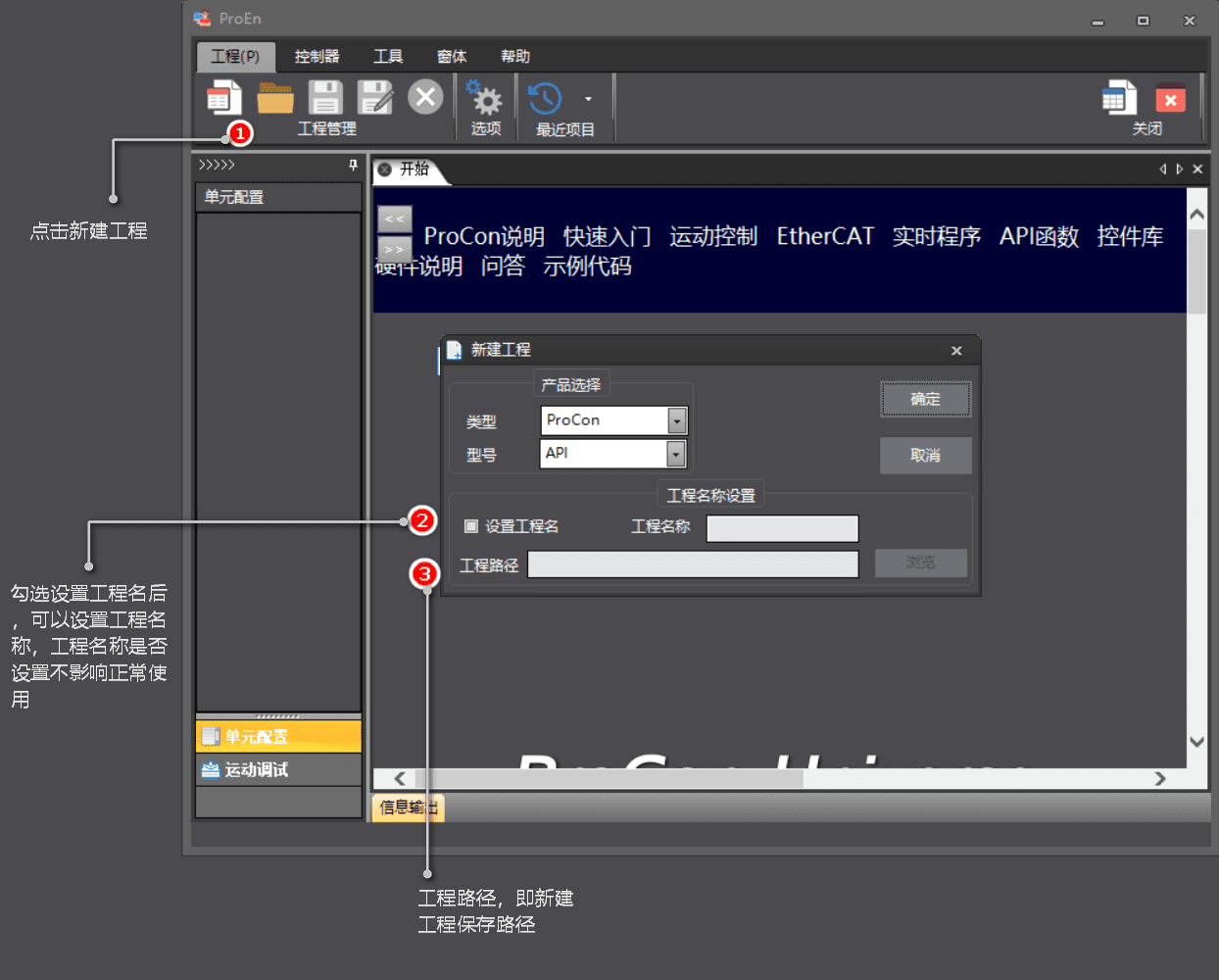
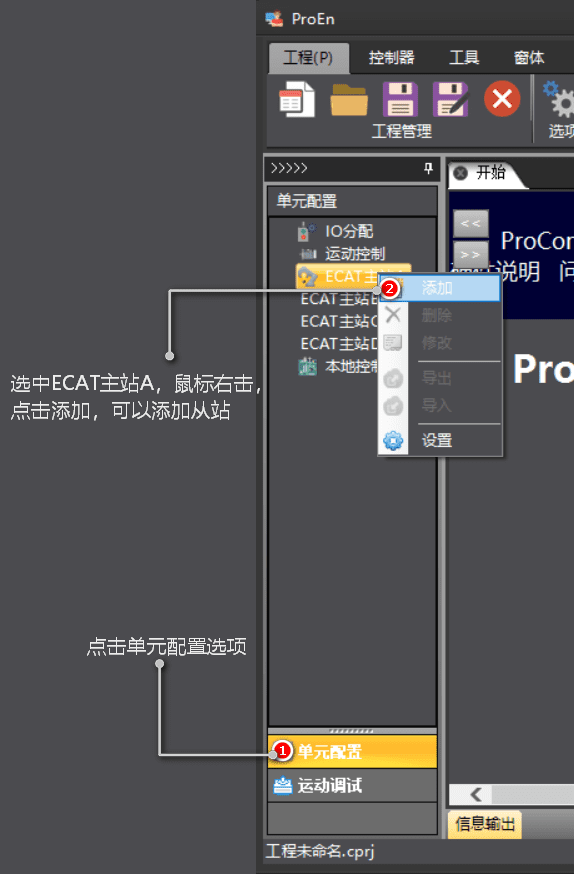
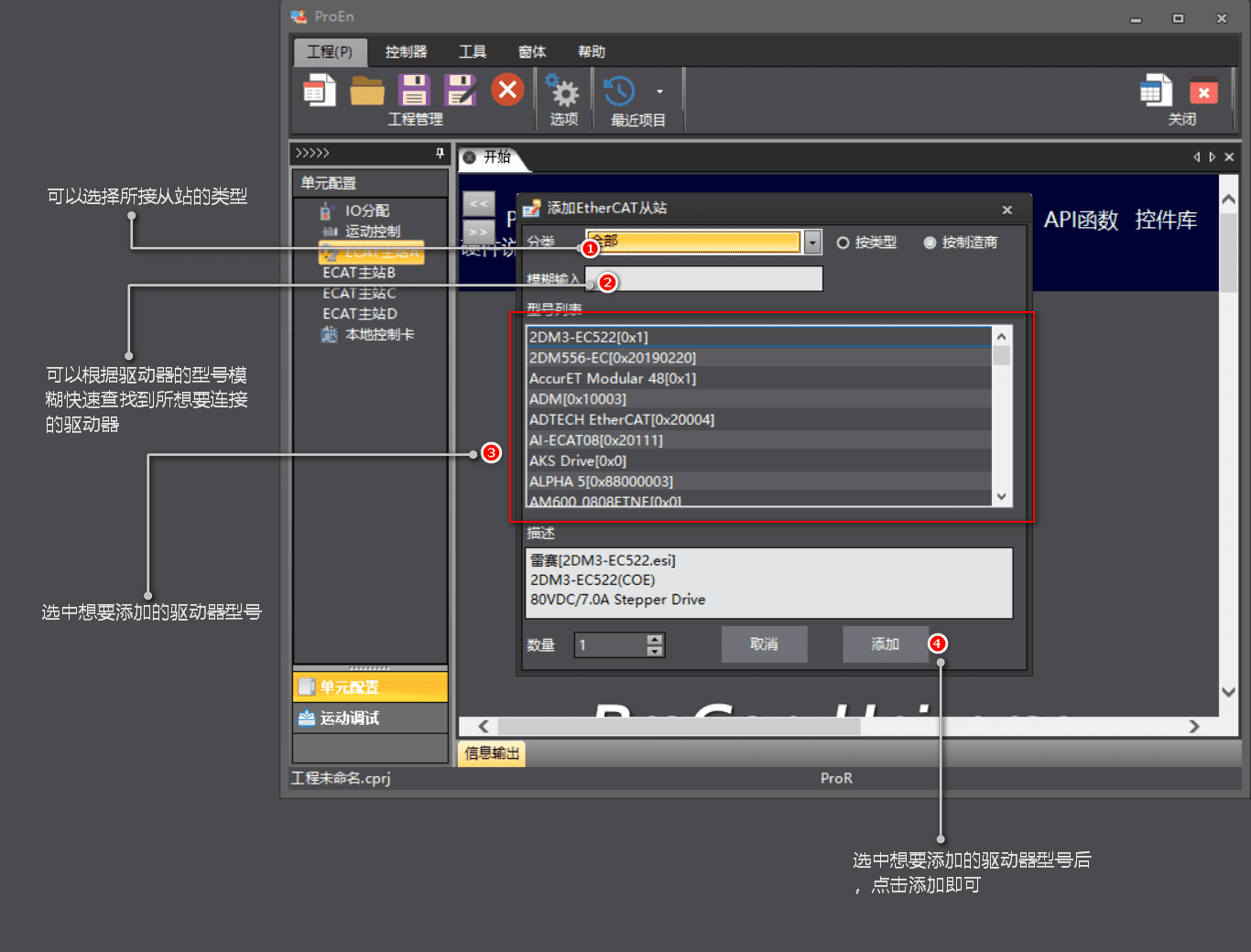
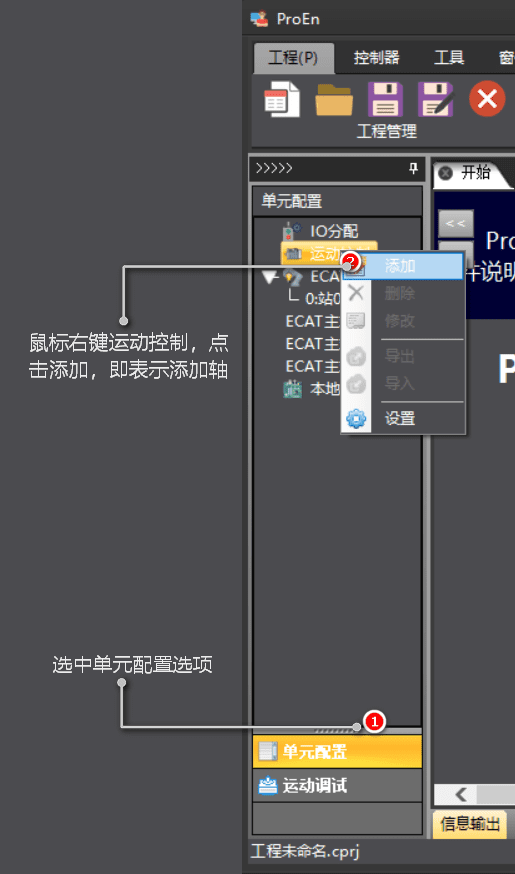
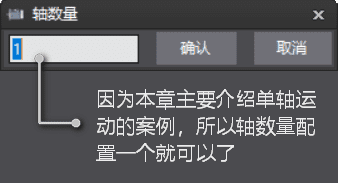
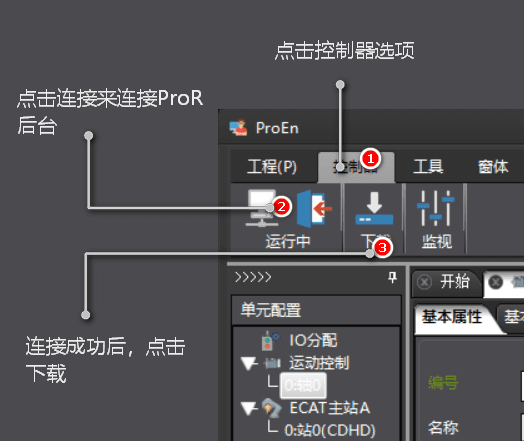
完成前面的所有步骤后,我们可以开始通过软件配置想要的功能了,ProR是用于后台运行的软件,右下角ProR软件小图标闪动表示ProR后台正常运行,ProEn是用于配置的工具,这里我们主要是对ProEn配置工具软件进行操作

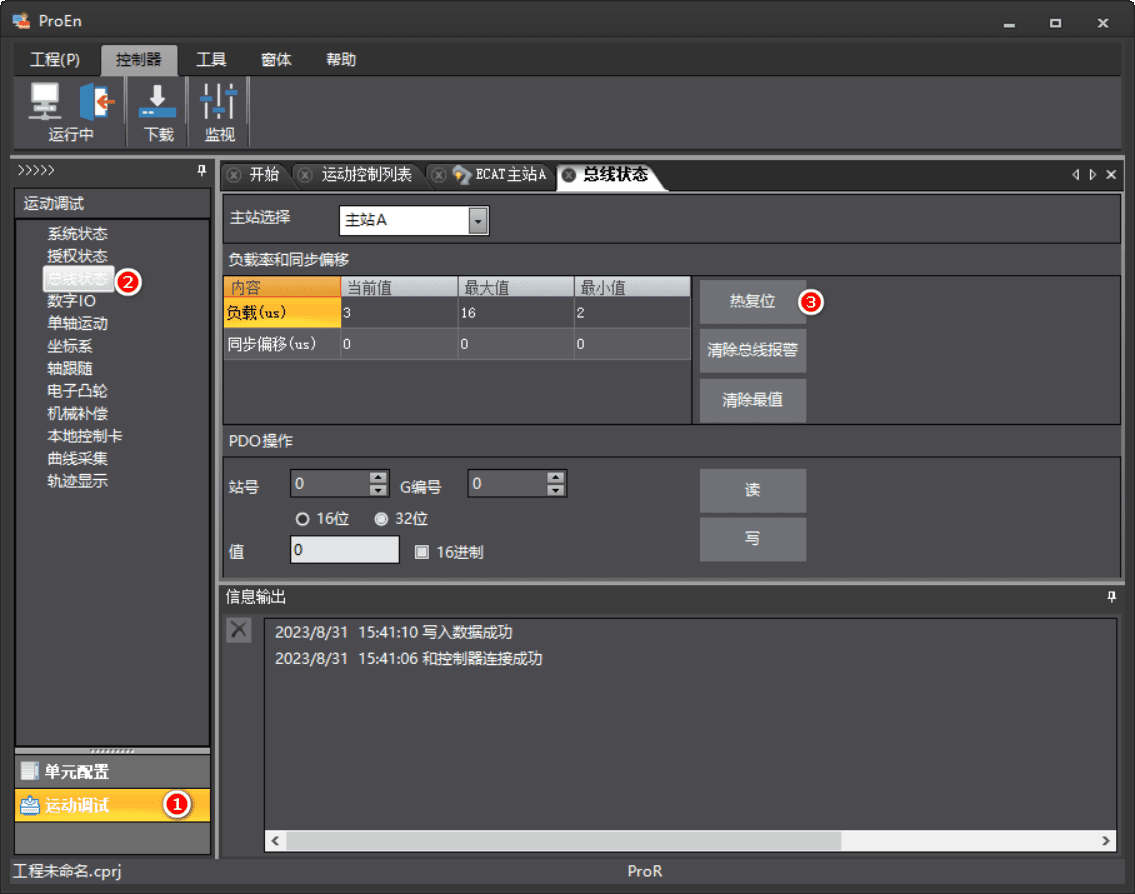
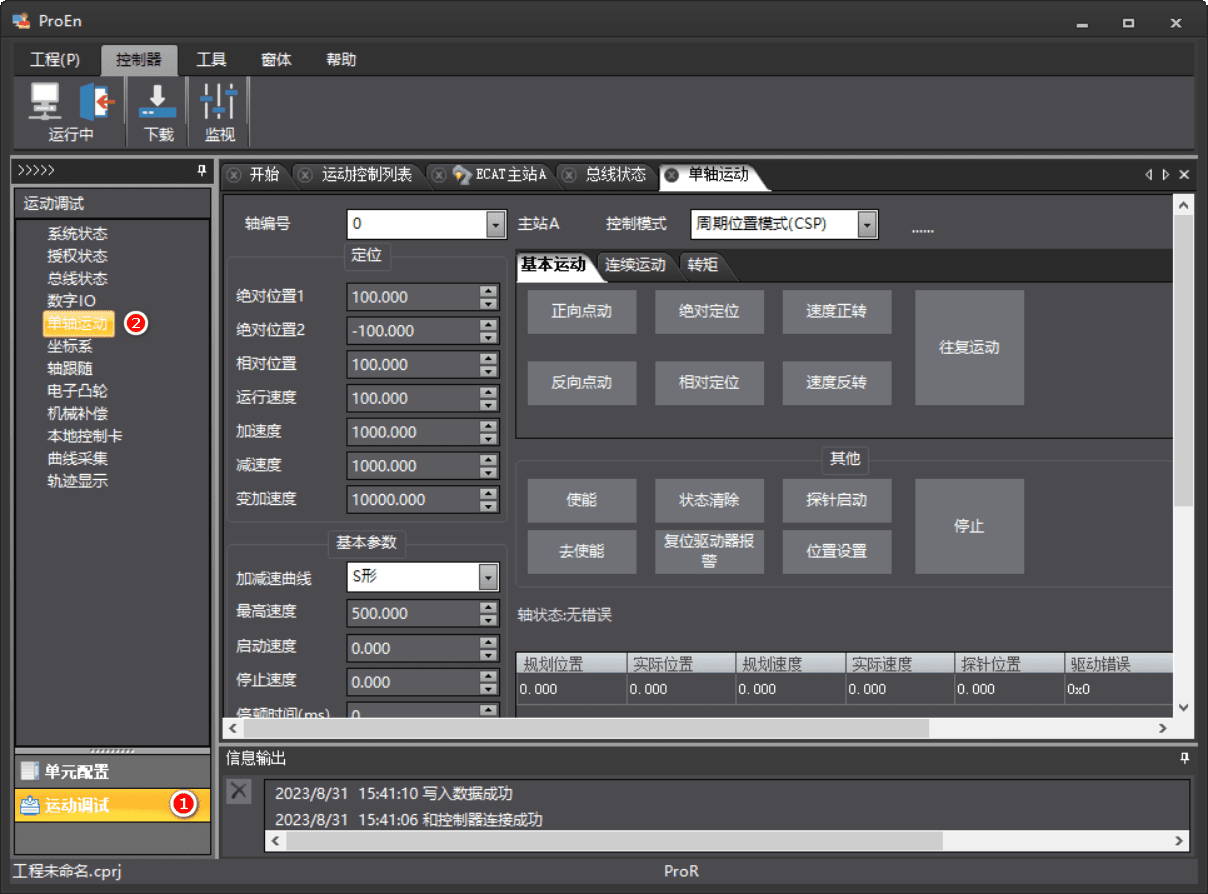
以上就是对如何实现一个单轴运动的简单流程介绍,想了解软件更多的功能和使用方法在手册的快速入门模块有详细介绍:快速入门。
如果自己想根据具体指定的运动方式设计单轴运动,也可以自己编程设计运动,例如单轴的位置运动,详情见运动控制章节中的位置运动:单轴位置运动。
除此之外,在本手册中的运动控制和API函数章节详细的说明了各种运动的运动原理以及要使用到的API函数,详情见:运动控制和API函数。
除了以上可以使用到的API函数外,我们还提供了能够在实时系统运行的NoTime程序,能够为你所需要达到的运动提供更好的实时性,详情见:NoTime。
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |