 s
s| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
验证:可通过打印日志或者调式代码打断点,查看目标位置是否合理
解决方案:如果目标位置异常则代码请修改程序
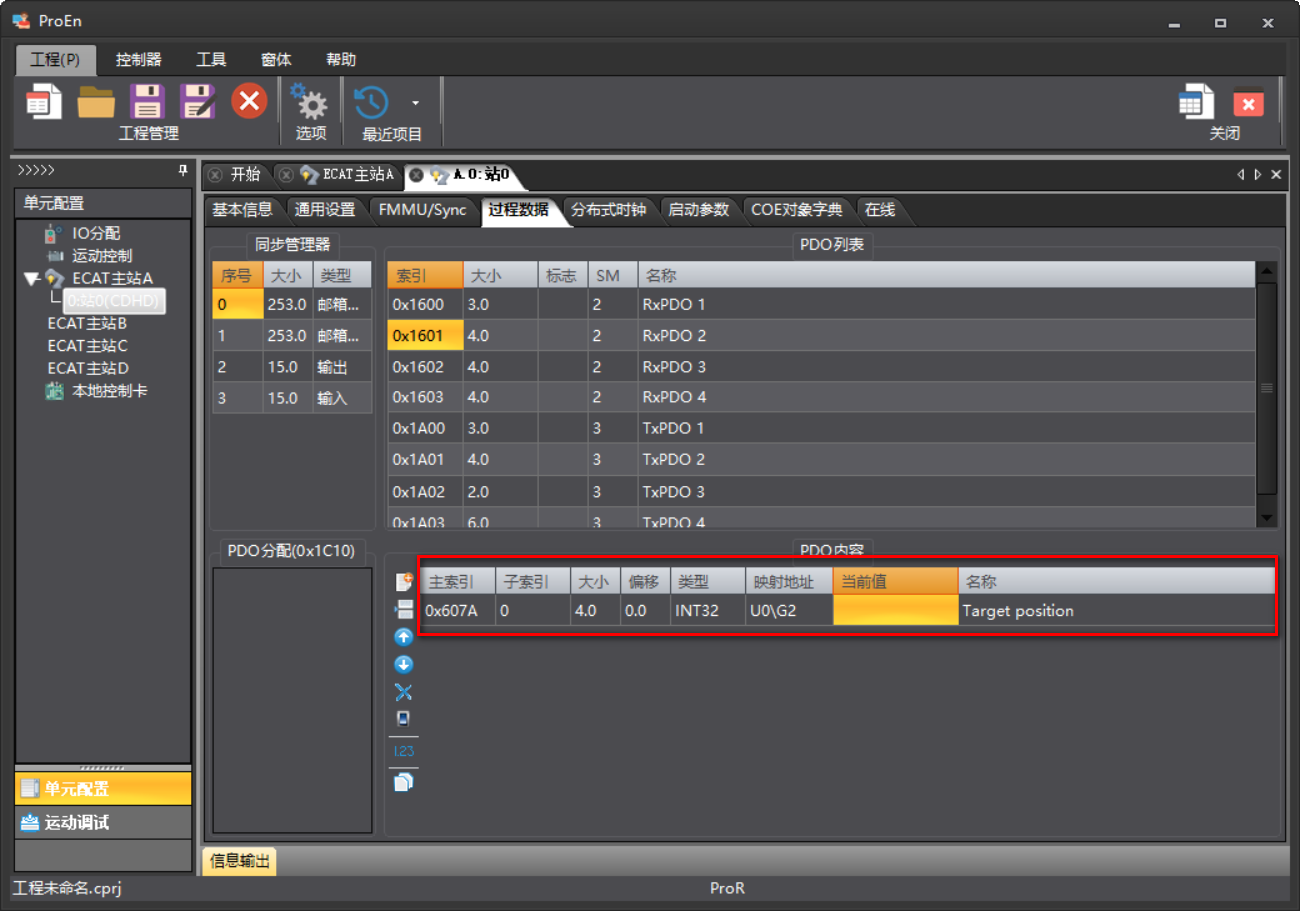
验证:打开ProEn,检查轴所连接的驱动器的过程数据,检查寄存器0x607A的值是否正常
可以通过当量换算出脉冲数去检查0x607A(U\G读取)当前读取到的值是否正常
注意:使用了上位机回零或者位置设置命令的,607A读取到的值与实际位置之间有一个固定偏差
s
解决方案:0x607A的当前值不正常请联系厂家进行确认
验证:如果驱动器调试软件支持的情况下,打开驱动器调试软件查看寄存器0x607A的当前值是否和ProEn中的寄存器0x607A的当前值一致
解决方案:如果驱动器调试软件和ProEn的607A的值不一致,请联系驱动器和控制器双方一起解决
验证:1.检查ProEn的反馈位置(实际位置)是否和规划位置一致
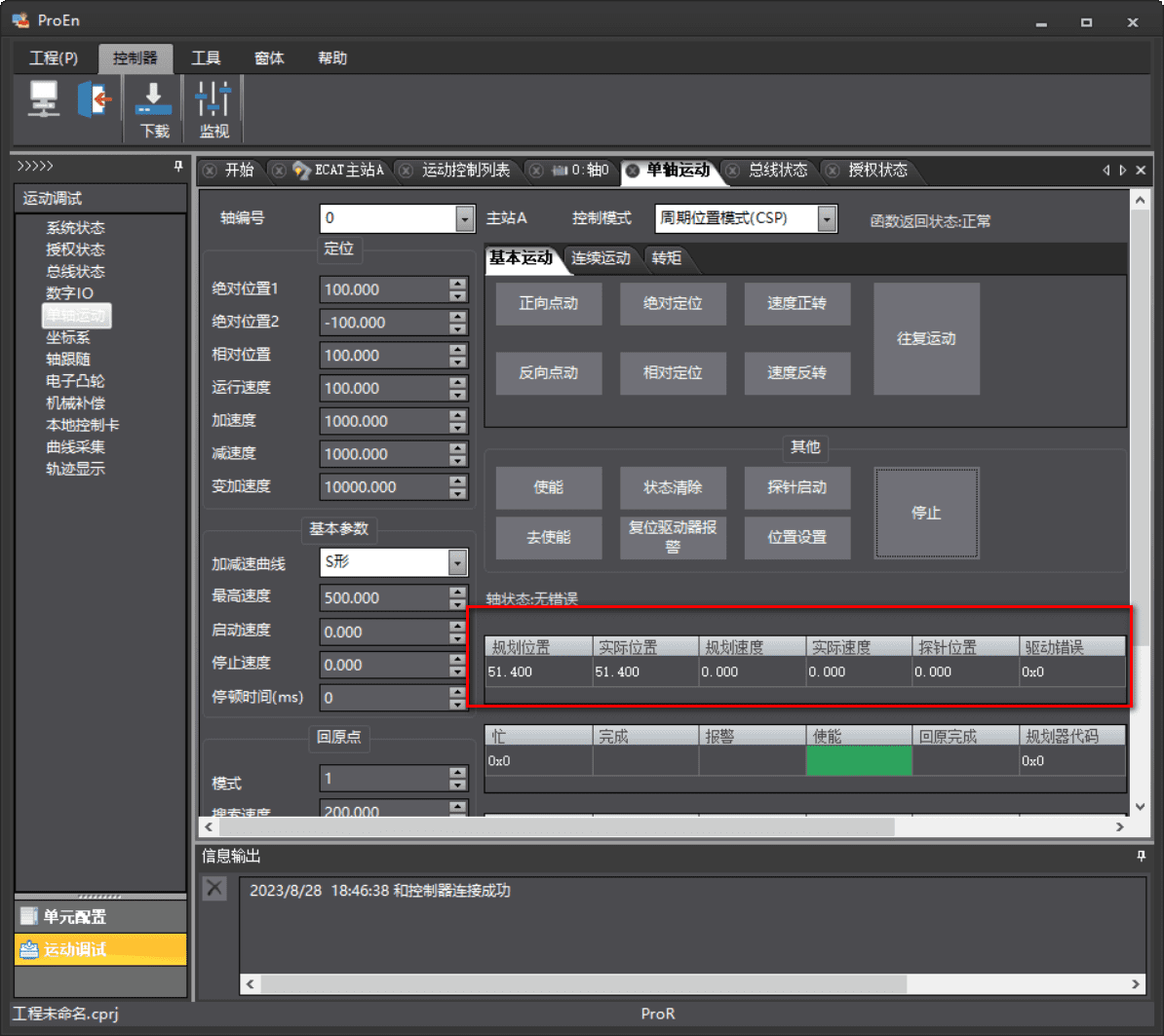
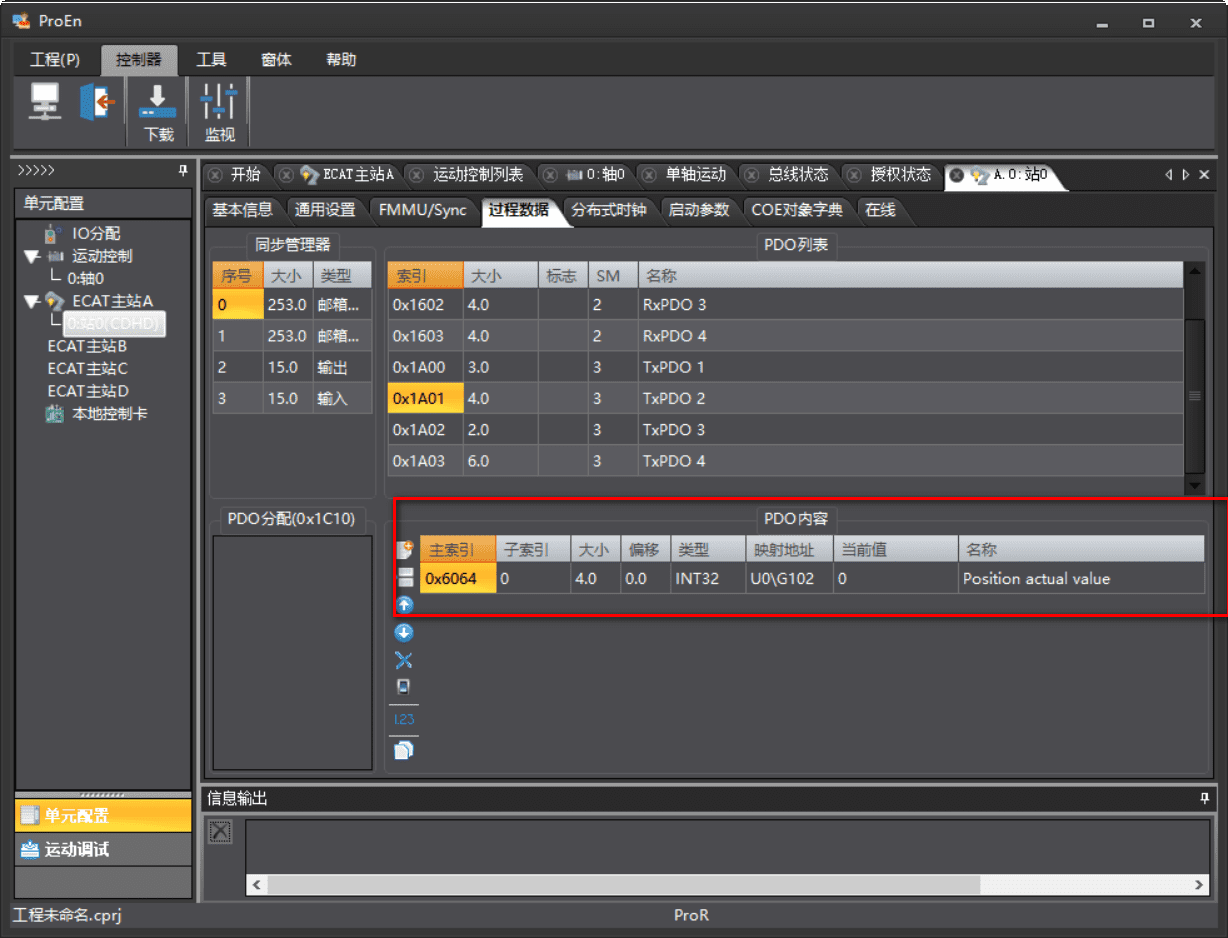
验证:2.检查ProEn的过程数据中的寄存器0x6064读取到的当前值,通过当量换算后,是否和规划位置一致
解决方案:
1.驱动器刚性在驱动器调试软件上监控速度曲线,可能需要调整刚性
2.驱动器内部报警,未运动。需确认具体报警原因
1.检查联轴器是否松动
2检查编码器是否接触好
3.联系驱动器厂家确认问题
4.确认是否设置为虚拟轴
5.确认当量是否正确
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |