XMen IO接口定义
| 注意 |
|
 |
|
|
|
| 输出端口 |
功能描述 |
输出端口 |
功能描述 |
| Y0 |
DO0.0 轴0脉冲 |
Y10 |
DO1.0 轴8脉冲 |
| Y1 |
DO0.1 轴1脉冲 |
Y11 |
DO1.1 轴9脉冲 |
| Y2 |
DO0.2 轴2脉冲 |
Y12 |
DO1.2 轴10脉冲 |
| Y3 |
DO0.3 轴3脉冲 |
Y13 |
DO1.3 轴11脉冲 |
| COM0 |
GND |
COM1 |
GND |
| Y4 |
DO0.4 轴4脉冲 |
Y14 |
DO1.4 轴12脉冲 |
| Y5 |
DO0.5 轴5脉冲 |
Y15 |
DO1.5 轴13脉冲 |
| Y6 |
DO0.6 轴6脉冲 |
Y16 |
DO1.6 轴14脉冲 |
| Y7 |
DO0.7 轴7脉冲 |
Y17 |
DO1.7 轴15脉冲 |
| COM0 |
GND |
COM1 |
GND |
| Y20 |
DO2.0 轴0方向 |
Y30 |
DO3.0 轴8方向 |
| Y21 |
DO2.1 轴1方向 |
Y31 |
DO3.1 轴9方向 |
| Y22 |
DO2.2 轴2方向 |
Y32 |
DO3.2 轴10方向 |
| Y23 |
DO2.3 轴3方向 |
Y33 |
DO3.3 轴11方向 |
| COM2 |
GND |
COM3 |
GND |
| Y24 |
DO2.4 轴4方向 |
Y34 |
DO3.4 轴12方向 |
| Y25 |
DO2.5 轴5方向 |
Y35 |
DO3.5 轴13方向 |
| Y26 |
DO2.6 轴6方向 |
Y36 |
DO3.6 轴14方向 |
| Y27 |
DO2.7 轴7方向 |
Y37 |
DO3.7 轴15方向 |
| COM2 |
GND |
COM3 |
GND |
| 输入端口 |
功能描述 |
输入端口 |
功能描述 |
| X0 |
DI0.0 高速输入(轴0探针) |
X10 |
DI1.0 高速输入(轴8探针) |
| X1 |
DI0.1 高速输入(轴1探针) |
X11 |
DI1.1 高速输入(轴9探针) |
| X2 |
DI0.2 高速输入(轴2探针) |
X12 |
DI1.2 高速输入(轴10探针) |
| X3 |
DI0.3 高速输入(轴3探针) |
X13 |
DI1.3 高速输入(轴11探针) |
| X4 |
DI0.4 高速输入(轴4探针) |
X14 |
DI1.4 高速输入(轴12探针) |
| X5 |
DI0.5 高速输入(轴5探针) |
X15 |
DI1.5 高速输入(轴13探针) |
| X6 |
DI0.6 高速输入(轴6探针) |
X16 |
DI1.6 高速输入(轴14探针) |
| X7 |
DI0.7 高速输入(轴7探针) |
X17 |
DI1.7 高速输入(轴15探针) |
| SS/S1 |
24V |
SS/S2 |
24V |
| X20 |
DI2.0 高速输入 |
X30 |
DI3.0 高速输入(编码器0A相) |
| X21 |
DI2.1 高速输入 |
X31 |
DI3.1 高速输入(编码器0B相) |
| X22 |
DI2.2 高速输入 |
X32 |
DI3.2 高速输入(编码器1A相) |
| X23 |
DI2.3 高速输入 |
X33 |
DI3.3 高速输入(编码器1B相) |
| X24 |
DI2.4 高速输入 |
X34 |
DI3.4 高速输入(编码器2A相) |
| X25 |
DI2.5 高速输入 |
X35 |
DI3.5 高速输入(编码器2B相) |
| X26 |
DI2.6 高速输入 |
X36 |
DI3.6 高速输入(编码器3A相) |
| X27 |
DI2.7 高速输入 |
X37 |
DI3.7 高速输入(编码器3B相) |
| SS/S3 |
24V |
SS/S4 |
24V |
| 注意 |
|
| |
- 控制输出为24v单端信号,脉冲模式只支持脉冲+方向
|
|
|
| 序号 |
脉冲输出口 |
方向输出口 |
硬件探针 |
| 0 |
DO0.0 |
DO2.0 |
DI0.0 |
| 1 |
DO0.1 |
DO2.1 |
DI0.1 |
| 2 |
DO0.2 |
DO2.2 |
DI0.2 |
| 3 |
DO0.3 |
DO2.3 |
DI0.3 |
| 4 |
DO0.4 |
DO2.4 |
DI0.4 |
| 5 |
DO0.5 |
DO2.5 |
DI0.5 |
| 6 |
DO0.6 |
DO2.6 |
DI0.6 |
| 7 |
DO0.7 |
DO2.7 |
DI0.7 |
| 8 |
DO1.0 |
DO3.0 |
DI1.0 |
| 9 |
DO1.1 |
DO3.1 |
DI1.1 |
| 10 |
DO1.2 |
DO3.2 |
DI1.2 |
| 11 |
DO1.3 |
DO3.3 |
DI1.3 |
| 12 |
DO1.4 |
DO3.4 |
DI1.4 |
| 13 |
DO1.5 |
DO3.5 |
DI1.5 |
| 14 |
DO1.6 |
DO3.6 |
DI1.6 |
| 15 |
DO1.7 |
DO3.7 |
DI1.7 |
| 注意 |
|
| |
- 共支持4个编码器(32位),包括2种模式:脉冲+方向、正交脉冲(4倍频)
- 脉冲+方向(A为脉冲,B为方向) :当方向为高时,根据脉冲上升沿进行加计数,时当方向为低时,根据脉冲上升沿进行减计数
- 正交脉冲(4倍频):判断是正向AB模式,根据A和B脉冲上升沿进行加计数,判断是反向AB模式,根据A和B脉冲上升沿进行减计数
- 正反脉冲:不支持
|
|
|
| 序号 |
A相(控制的DI通道) |
B相 (控制的DI通道) |
| 0 |
DI3.0 |
DI3.1 |
| 1 |
DI3.2 |
DI3.3 |
| 2 |
DI3.4 |
DI3.5 |
| 3 |
DI3.6 |
DI3.7 |
| 注意 |
|
| |
- 只支持一维比较(一维即比较一个编码器的值)
- 当编码器的当前值到达比较器设定的值时,对应的DO口输出,同时控制4个
|
|
|
1.固定位置模式:
1.该模式最多比较15个位置,每次启动时会先比较“位置0”的位置,然后比较“位置1”的位置,比较完之后需要重新启动比较功能。
2.线性模式:
1.该模式的硬件缓存最大为15,但数量参数设置0时为无限数量。
3.先进先出模式:
1.该模式最大的特点是可以在比较过程中连续不断的往里面写比较数据。判断硬件缓存数量大于14后不可继续写数据,待比较了部分位置后,硬件缓存剩余数量减少到14以下时才可继续在比较过程中往缓冲区中继续写入比较位置
| 比较器序号 |
编码器序号 |
控制的DO通道 |
| 0 |
0 |
DO2.0~DO2.3 |
| 1 |
1 |
DO2.4~DO2.7 |
| 2 |
2 |
DO3.0~DO3.3 |
| 3 |
3 |
DO3.4~DO3.7 |
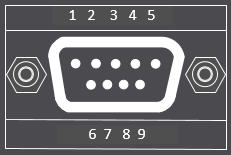
| 针脚 |
COM1-RS232 |
COM2-RS485 |
| 1 |
DCD |
RS485_B |
| 2 |
接收数据 RXD |
RS485_A |
| 3 |
发送数据 TXD |
NC |
| 4 |
DTR |
NC |
| 5 |
GND |
GND |
| 6 |
DSR |
NC |
| 7 |
RTS |
NC |
| 8 |
CTS |
NC |
| 9 |
RI |
NC |