RetCode result;
int exit_cmd = 0;
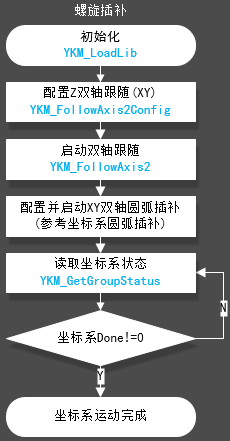
//库加载
result = YKM_LoadLib();
YKM_BusInfo busInfo;
//等待系统初始化完成
while (!exit_cmd)
{
result = YKM_GetBusInfo(&busInfo);
if (busInfo.running)
break;
Sleep(100);
}
//配置双轴跟随
YKM_FollowAxis2Config followAxis2Config;
memset(&followAxis2Config, 0, sizeof(YKM_FollowAxis2Config));
followAxis2Config.combineMode = YKM_CombineMode::YKM_COMBINE_CIRCLE;
followAxis2Config.source1 = YKM_AxisFollowType::YKM_FOLLOW_ACT_POS;
followAxis2Config.source2 = YKM_AxisFollowType::YKM_FOLLOW_ACT_POS;
followAxis2Config.axisMaster1 = 0;
followAxis2Config.axisMaster2 = 1;
followAxis2Config.numerator1 = 1.0;
followAxis2Config.numerator2 = 1.0;
followAxis2Config.numerator3 = 1.0;
followAxis2Config.denominator1 = 1.0;
followAxis2Config.denominator2 = 1.0;
followAxis2Config.denominator3 = 1.0;
followAxis2Config.center1 = 1.0;
followAxis2Config.center2 = 1.0;
followAxis2Config.Acceleration = 100.0;
followAxis2Config.Jerk = 1000.0; //启动双轴跟随
result = YKM_FollowAxis2(axisIndex, followAxis2Config);
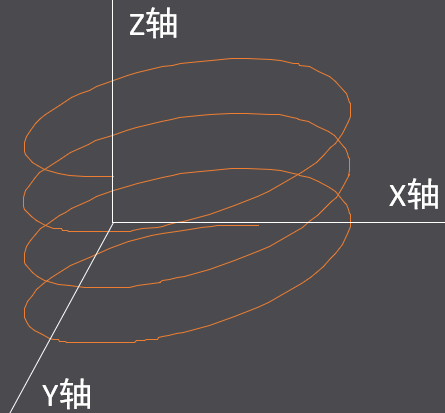
print(result);///启动圆弧插补,从轴跟随主轴动作,主轴转一圈,从轴上下1mm(numerator3,denominator3)比例 |