RetCode result;
int exit_cmd = 0;
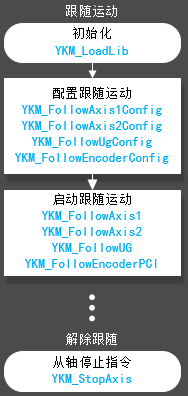
//库加载
result = YKM_LoadLib();
YKM_BusInfo busInfo;
//等待系统初始化完成
while (!exit_cmd)
{
result = YKM_GetBusInfo(&busInfo);
if (busInfo.running)
break;
Sleep(100);
}
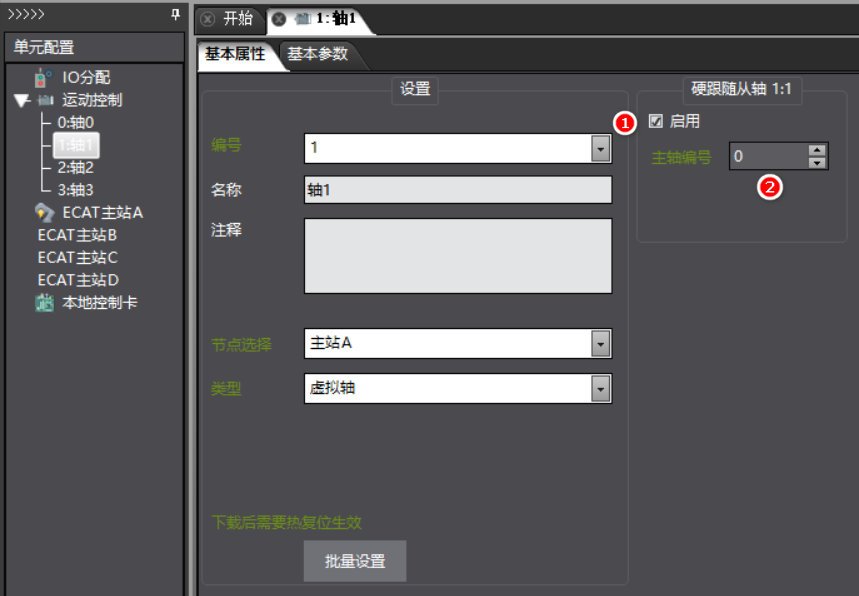
//轴跟随其他单轴
UINT32 axisIndex = 1;
YKM_FollowAxis1Config followAxis1Config;
followAxis1Config.Acceleration = 100.0;
followAxis1Config.Jerk = 1000.0;
followAxis1Config.axisMaster = 0;
followAxis1Config.mode = YKM_FollowMode::YKM_FOLLOW_ACC;
followAxis1Config.source = YKM_AxisFollowType::YKM_FOLLOW_ACT_POS;
followAxis1Config.numerator = 1.0;
followAxis1Config.denominator = 1.0;
YKM_FollowAxis1(axisIndex, followAxis1Config);
//主轴运动
YKM_MoveAbsoluteConfig absConfig;
absConfig.position = 200.123;
absConfig.velocity = 100;
absConfig.acceleration = 100;
absConfig.deceleration = 100;
absConfig.jerk = 1000;
result = YKM_MoveAbsolute(0, absConfig);
//等待运动完成
YKM_AxisStatus status;
while (!exit_cmd)
{
result = YKM_ReadAxisInfo(axisIndex, &status);
if (0 != status.Done)
break;
Sleep(1);
}
|