| 上一页 | 下一页 |
基本参数包含了轴定位控制涉及到的所有参数,在此可根据实际需要设置一些必要的参数。每个参数都对应了一个R编号,即可以通过在程序中修改对应R的值来达到修改某一个参数的目的。每个存放参数的R元件都会断电保持,但是如果运动参数重新下载后,所有参数会根据下表更新。
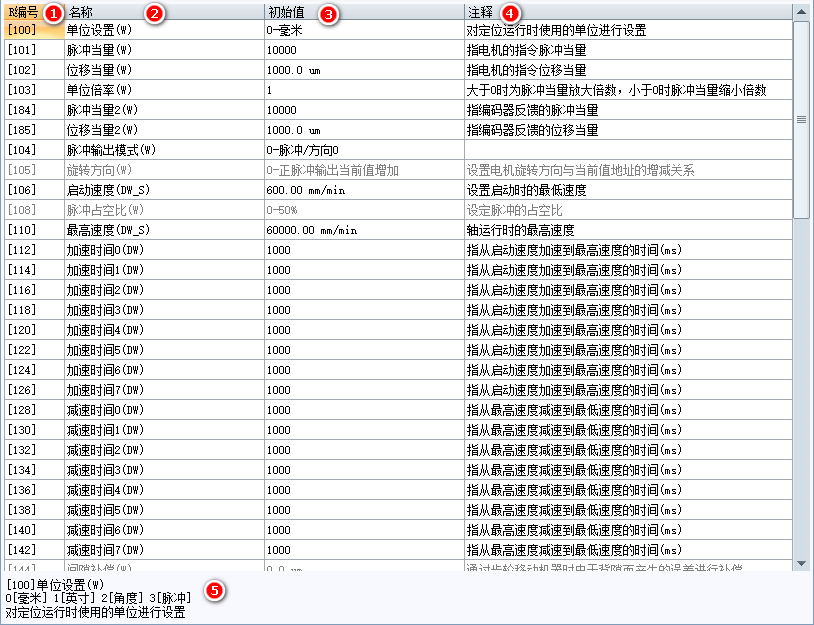
| 1 | 参数对应的R元件编号 |
| 2 | 名称后面括号中的代码,W表示单字,DW表示双字,DW_S表示速度 |
| 3 | 初始值,下载时R元件会用这里的值更新 |
| 4 | 详细说明 |
| 5 | 选中每个参数时,显示对应的提示信息,参数作用、可设置范围等,以便提示用户合理的修改参数 |
| R编号 | 名称 | 说明 |
| 100 | 单位设置 | 根据实际需选择毫米、角度或者脉冲作为定位单位。一般直线轴选毫米单位,旋转轴选择角度单位。 当轴用于视觉和CAD时,直线轴必须是毫米单位,旋转轴必须是角度单位。 位置和速度相关寄存器都用整数定标方式表示,毫米单位时当量是0.1um和0.01mm/min,角度单位时当量是0.00001度和0.001mm/min |
| 101 | 脉冲当量 | 规划用。ProU没有考虑外部的传动结构,需要用户先计算好脉冲数量和位移量的比例关系,取最大公约数。由于历史原因,这两个参数设计成16位的,偶尔会有除不尽的情况,则可以修改103参数达到目的。 当103参数大于0时,当量比例相当于[101]*[103]/[102]; 当103参数小于0时,当量比例相当于[101]/(-1*[103]*[102])。 ProU也提供当量自动计算工具。 |
| 102 | 位移当量 | |
| 103 | 单位倍率 | |
| 184 | 脉冲当量2 | 反馈用,和101分开设置,可以适用全闭环的场合。 |
| 185 | 位移当量2 | |
| 104 | 脉冲输出形式 | 旧功能,已弃用 |
| 105 | 旋转方向 | 旧功能,已弃用 |
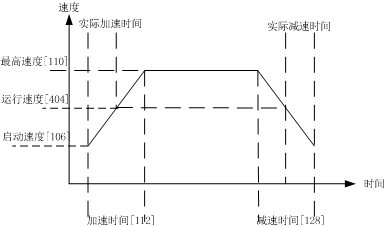
| 106 | 启动速度 | 运动的最低速度,其他所有速度设置小于此参数时,内部会用此值替代 |
| 108 | 脉冲占空比 | 旧功能,已弃用 |
| 110 | 最高速度 | 运动的最高速度,其他所有速度设置大于此参数时,内部会用此值替代 |
| 112 | 加速时间0 | 8组加速时间,指从启动速度[106]到最高速度[110]的时间。 定位、点动、回零、CAD的加速时间用编号0~7选择 |
| 114 | 加速时间1 | |
| 116 | 加速时间2 | |
| 118 | 加速时间3 | |
| 120 | 加速时间4 | |
| 122 | 加速时间5 | |
| 124 | 加速时间6 | |
| 126 | 加速时间7 | |
| 128 | 减速时间0 | 8组减速时间,指从最高速度[110]减速到启动速度[106]的时间。 定位、点动、回零、CAD的减速时间用编号0~7选择 |
| 130 | 减速时间1 | |
| 132 | 减速时间2 | |
| 134 | 减速时间3 | |
| 136 | 减速时间4 | |
| 138 | 减速时间5 | |
| 140 | 减速时间6 | |
| 142 | 减速时间7 | |
| 144 | 间隙补偿 | 未实现 |
| 146 | 软件正限位 | 软件行程的最大值,只对定位有效,点动及回零时无效。 定位时,如果目标值超过了最大行程值,则会运动到最大行程值的位置,同时报警。 |
| 148 | 软件负限位 | |
| 150 | 软限位选择 | 未实现 |
| 151 | 软限位使能 | 开启软限位功能,默认不开启 |
| 152 | 指令到位范围 | 1.定位时,当反馈位置和目标位置的偏差小于此值时,视为到位完成,定位指令给出定位完成信号。 2.EhterCAT PP模式下,会检查驱动器给的完成信号(6041.10)和定位完成信号,当两个信号都满足后,指令给出完成信号。 |
| 154 | 转矩限制 | 未实现 |
| 155 | M代码 | 旧功能,已弃用 |
| 156 | 速度切换方式 | 旧功能,已弃用 |
| 157 | 插补速度方式 | 未实现,默认用合成速度 |
| 158 | 保留 | |
| 159 | 保留 | |
| 160 | 速度位置切换 | 旧功能,已弃用 |
| 162 | 点动最高速度 | 点动时的最高速度,不能小于[106],不能大于[110] |
| 164 | 点动加速时间选择 | 0~7选择 |
| 165 | 点动减速时间选择 | 0~7选择 |
| 176 | 点动速度 | 点动时的速度给定 |
| 178 | 点动移动量 | 为0时,移动量为总行程的1/4;不为0时,相对移动设置值后停止 |
| 166 | 加减速方式 | 0=梯形,1=S曲线;S曲线只在CSP模式下有效。 |
| 167 | S形比率 | 0~100,0时退化为梯形曲线。 |
| 168 | 急停时间 | 停止方式选择急停时有效 |
| 169 | 指令关闭停止方式 | 0=减速停止;1=急停,急停时间为[168] |
| 170 | 保留 | |
| 171 | 保留 | |
| 172 | 定位信号输出时间 | 旧功能,已弃用 |
| 174 | 圆弧插补误差范围 | 圆弧轨迹与终点的误差允许范围 |
| 180 | CAD速度 | 可视化CAD控件和callg指令使用 |
| 182 | CAD加速时间选择 | 0~7选择 |
| 183 | CAD减速时间选择 | 0~7选择 |
| 186 | 跟随误差 | 运动过程中,检测规划位置和反馈位置的差值,超过此值后轴停止并报警。可调整驱动器参数,提高跟随能力。 |
| 188 | 探针类型 | 0-probe1;1-probe2;2-Z相,上位机回零使用 |
| 189 | 探针边沿 | 0-上升沿;1-下降沿 |
| 190 | 端口 0脉冲输出类型 | 旧功能,已弃用 |
| 207 | 端口 1脉冲输出类型 | 旧功能,已弃用 |
| 191 | 脉冲持续时间 | 旧功能,已弃用 |
| 192 | 端口0比较数量 | 用于飞拍点数设置,参考MCFLY指令 |
| 192 | 端口1比较数量 | |
| 194 | 端口0比较数据首地址类型 | |
| 195 | 端口0比较数据首地址编号 | |
| 196 | 端口1比较数据首地址类型 | |
| 197 | 端口1比较数据首地址编号 | |
| 198 | 视觉命令地址 | 参考视觉寄存器列表 |
| 200 | 视觉命令地址 | |
| 202 | 错误代码 | 保存运行出错时的错误代码 |
| 204 | 速度限制 | 转矩模式下的速度限制,未实现 |
| 206 | 变速变位置 | 开启变速变位置功能 |
| 216 | 缓冲模式 | 连续轨迹缓冲模式 0-立刻停止上一次运动并开始新的运动; 1-等上一次运动完成后开始新的运动; 2-用两次运动较低速度过渡; 3-用上一次运动速度过渡; 4-用当前运动速度过渡; 5-用两次运动较高速度过渡; |
| 217 | 过渡模式 | 连续轨迹过渡模式 0-无过渡; 1=开始速度; 2-固定速度; 3-拐角距离; 4-最大拐角偏差; 5-最大路径偏差; |
| 218 | 过渡参数 | 和217参数定义相关 使用10000定标的浮点数格式 |
| 220 | 跟随类型 | 配合定位模式3/12使用 |
| 221 | 比例参数1 | 配合定位模式3/12使用 [220]=1:分子(跟随轴) |
| 222 | 比例参数2 | 配合定位模式3/12使用 [220]=1:分母(主轴) |
| 223 | U编号 | 配合定位模式3使用 指定跟随站点U编号 |
| 224 | G编号 | 配合定位模式3使用 指定跟随站点G编号 |
| 225 | G宽度 | 配合定位模式3/12使用 |
工具-轴当量计算,如图所示
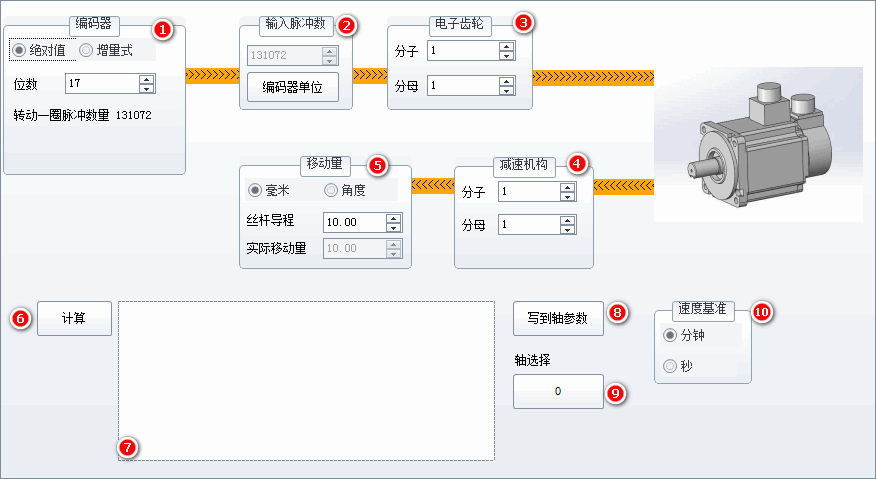
| 1 | 选择编码器类型;绝对值类型输入编码器位数,增量类型输入电机转一圈的脉冲数量 |
| 2 | 计算电机转一圈的脉冲数量 |
| 3 | 输入驱动器内设置的电子齿轮比 |
| 4 | 减速机构的比例 |
| 5 | 输入丝杆导程 |
| 6 | 计算当量值 |
| 7 | 显示计算过程 |
| 8 | 将计算结果写入指定轴号的当量参数 |
| 9 | 可批量选择轴编号 |
| 10 | 速度单位,mm/s,mm/min |
| 上一页 | 下一页 |