| 上一页 | 下一页 |
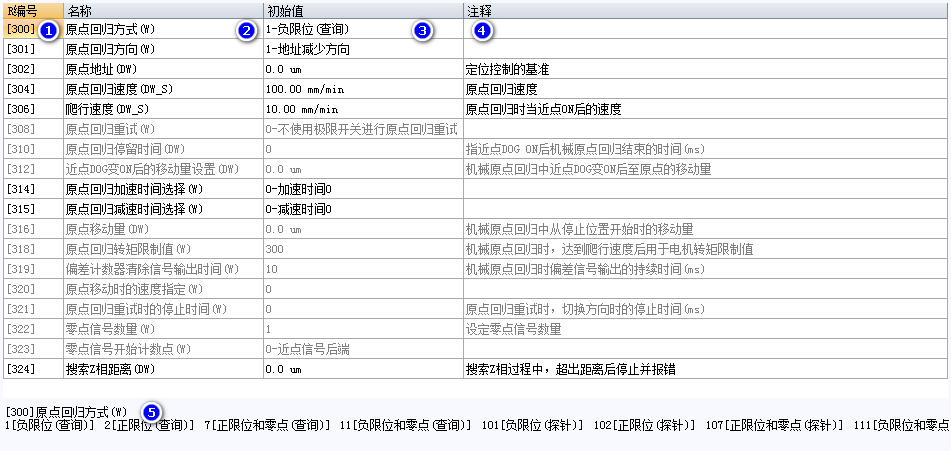
| 300 | 回归方式 | 参考回零模式 |
|---|---|---|
| 301 | 回归方向 | 旧功能,已弃用 |
| 302 | 原点地址 | 回零完成后,原点位置的当前值 |
| 304 | 回归速度 | 搜索零点过程速度 |
| 306 | 爬行速度 | 检测到减速点以后在找零点过程的速度 |
| 314 | 加速时间选择 | 0~7选择 |
| 315 | 减速时间选择 | 0~7选择 |
| 324 | 搜索Z相距离 | 上位机回零过程中,检测到减速点以后,找Z相过程中的最大移动距离,一般设丝杆导程的2倍 |
ProU支持三种形式的回零,指令都用MCZERO,参考回零指令。
查询式回零:
ProU执行回零的搜索过程,用PLC周期扫描方式检测零点位置,精度低。主要用于PCI控制卡模式,PCI卡的回零一般不带自动搜索功能,用查询式回零以后,再切换模式调用控制卡的回零功能,提高精度。
探针式回零:
总线轴:
ProU执行回零的搜索过程,利用总线驱动器的探针功能检测零点位置,精度高。将[188]号参数改为Z相。
注意:系统内部使用SDO模式访问探针相关寄存器,请勿将这些寄存器加入到PDO映射中。
步进轴探针回零:
ProU执行回零的搜索过程,利用XMEN卡高速输入口X0~X17底层检测限位信号,精度高。将[188]号参数改为卡内X0~X17配合使用。
驱动器回零:
ProU将回零模式以及速度等参数下发给驱动器,由驱动器自主执行回零过程。
注意采用查询式回零和探针式回零,回零完成后将原点偏移记录在PLC内部,当软件重启后原点偏移丢失,需要重新启动回零。
回零方式 |
探针、Z相说明 |
回零模式 |
说明 |
上位机回零 |
不带探针回零 |
1 |
负限位 |
2 |
正限位 |
||
7 |
正限位 + 零点 |
||
11 |
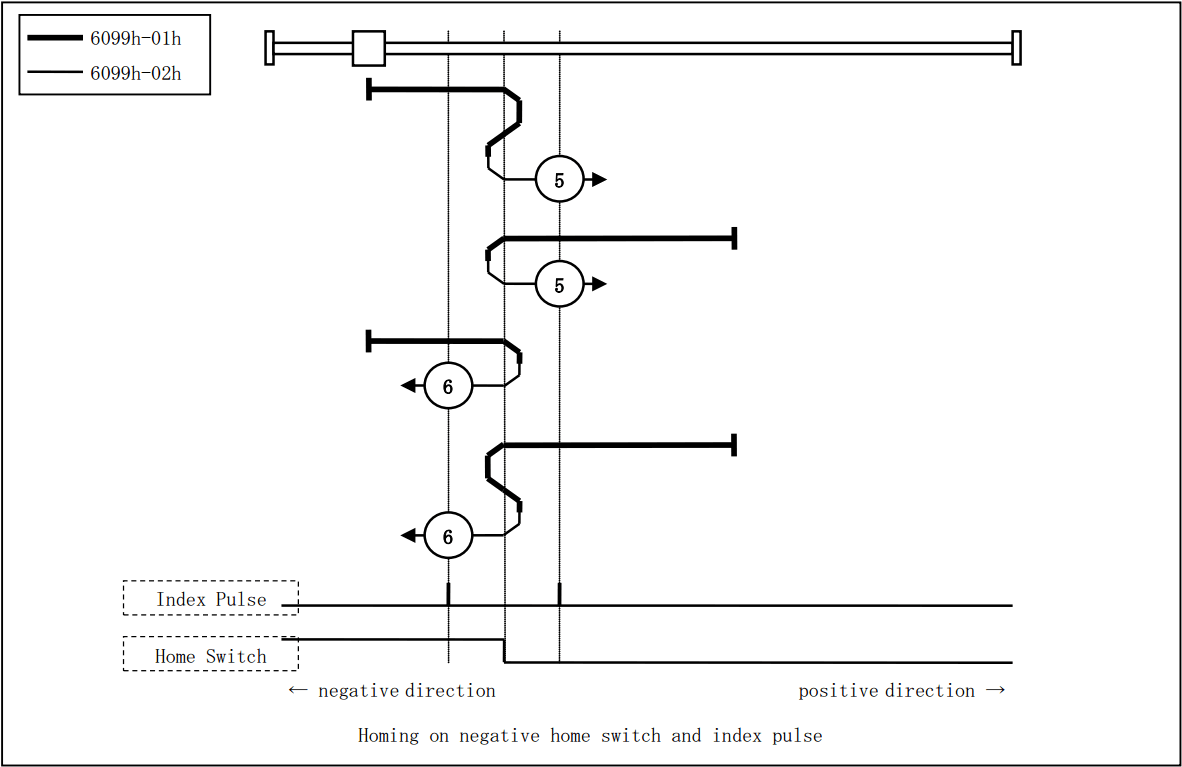
负限位 + 零点 |
||
带探针回零 (配合R188参数使用,Z相、probe) |
101 |
负方向找探针 |
|
102 |
正方向找探针 |
||
107 |
正限位 + 零点 + 探针 |
||
111 |
负限位 + 零点 + 探针 |
||
133 |
负方向找探针 |
||
134 |
正方向找探针 |
||
135 |
当前位置回零 |
||
旧功能,已弃用 |
201 |
旧功能,已弃用 |
|
202 |
|||
203 |
|||
204 |
|||
驱动器回零 总线驱动器使用 |
带Z相回零(伺服) |
10001 |
负限位 + Z相 |
10002 |
正限位 + Z相 |
||
10003 |
零点 + Z相 |
||
10004 |
|||
10005 |
|||
10006 |
|||
10007 |
正限位 + 零点 + Z相 |
||
10008 |
|||
10009 |
|||
10010 |
|||
10011 |
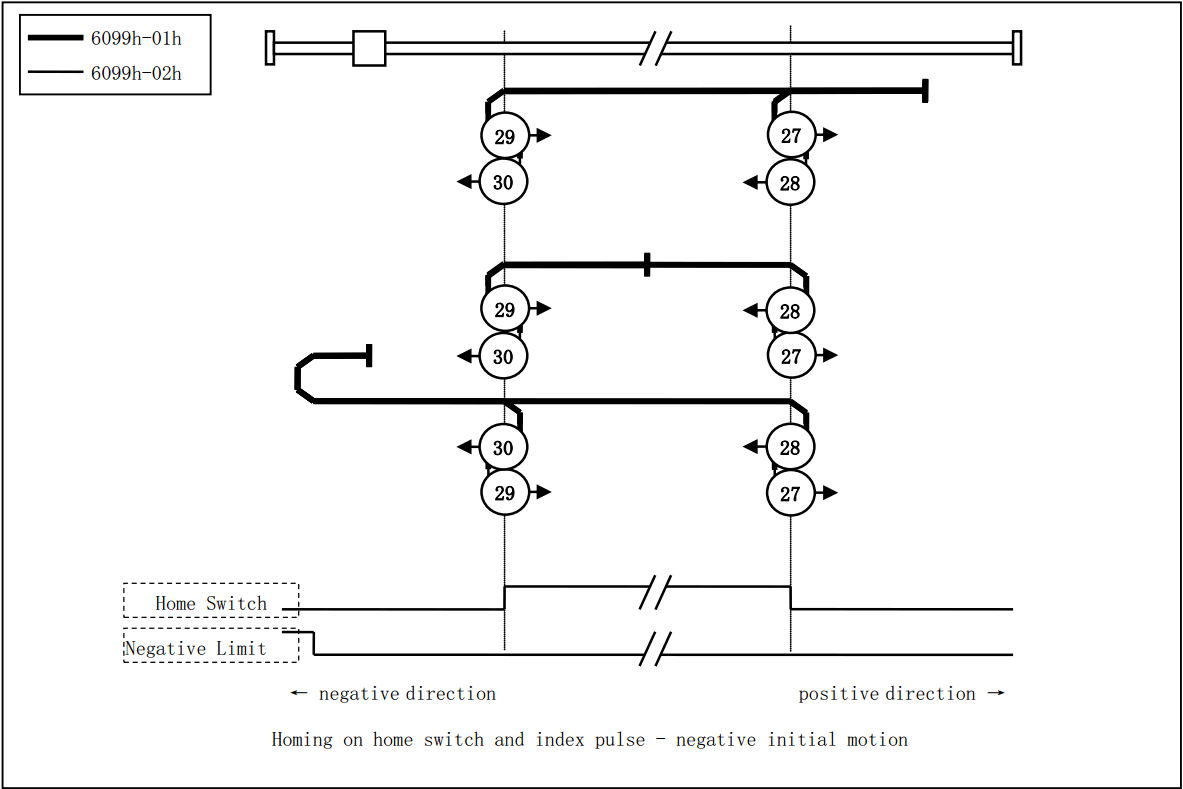
负限位 + 零点 + Z相 |
||
10012 |
|||
10013 |
|||
10014 |
|||
不带Z相回零(步进)
|
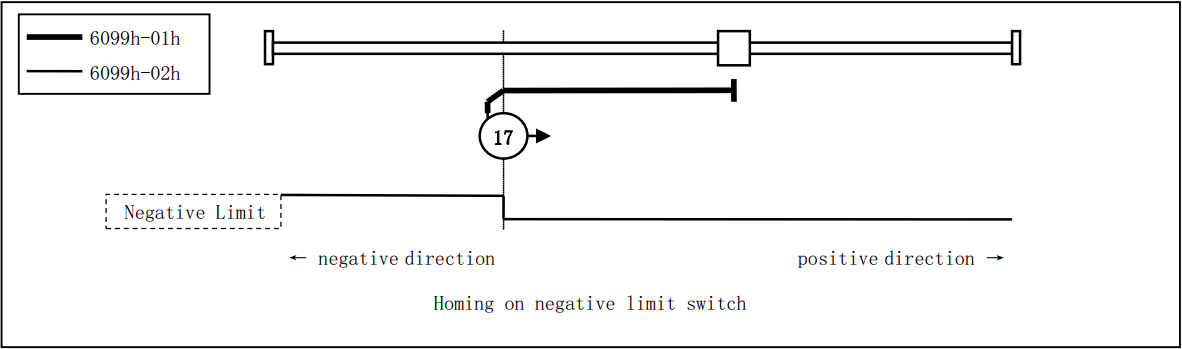
10017 |
负限位 |
|
10018 |
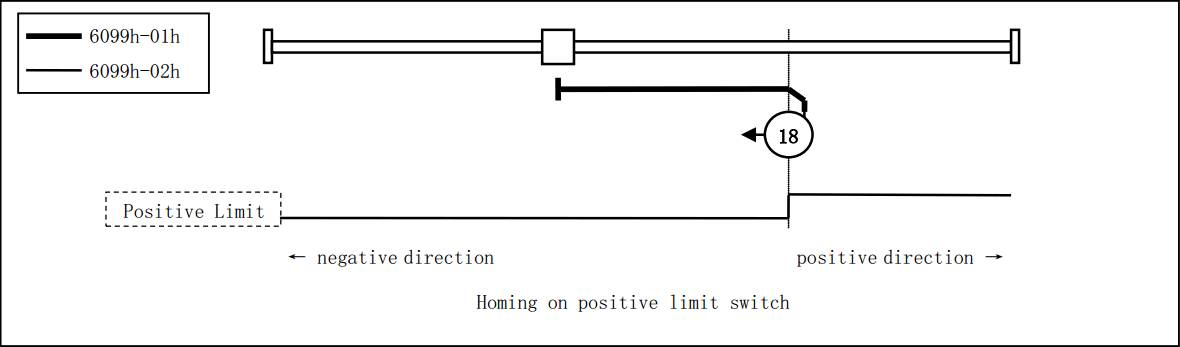
正限位 |
||
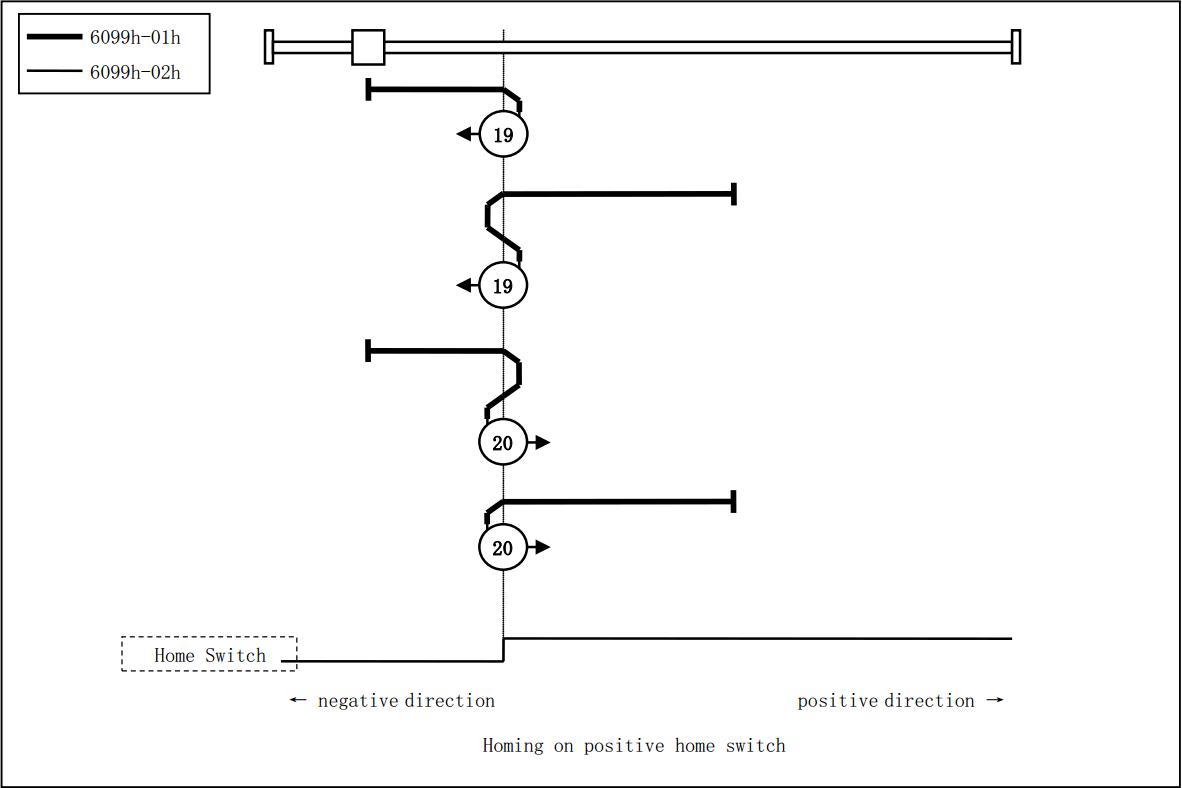
10019 |
零点 |
||
10020 |
|||
10021 |
|||
10022 |
|||
10023 |
正限位+零点 |
||
10024 |
|||
10025 |
|||
10026 |
|||
10027 |
负限位+零点 |
||
10028 |
|||
10029 |
|||
10030 |
|||
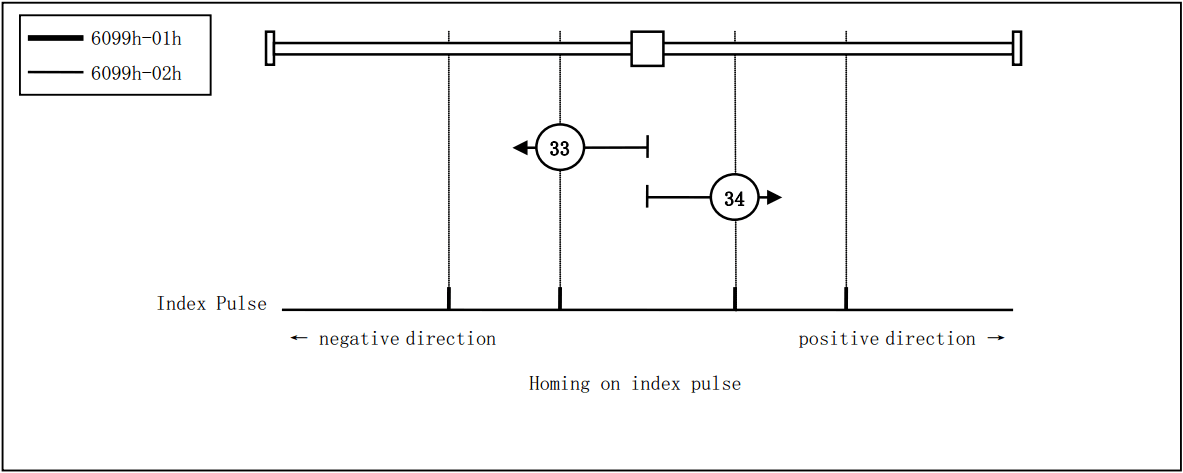
只带Z相回零 |
10033 |
负方向找Z相 |
|
10034 |
正方向找Z相 |
||
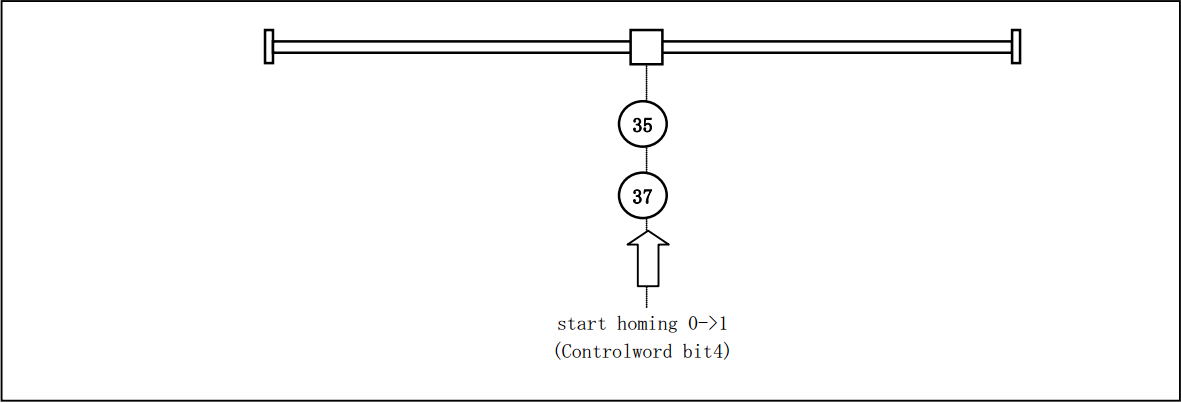
当前位置 |
10035 |
当前位置 |
|
10035 |
当前位置 |
||
采用负限位+Z相回零
当前不在负限位 1.负向运动 2.碰到负限位后反向 3.正向运动 4.找到Z相信号 5.完成
|
|
1.正向运动 2.找到Z相信号 3.完成 |
|
采用正限位+Z相回零
当前不在正限位 1.正向运动 2.碰到正限位后反向 3.负向运动 4.找到Z相信号 5.完成 |
|
当前在正限位 1.负向运动 2.找到Z相信号 3.完成 |
|
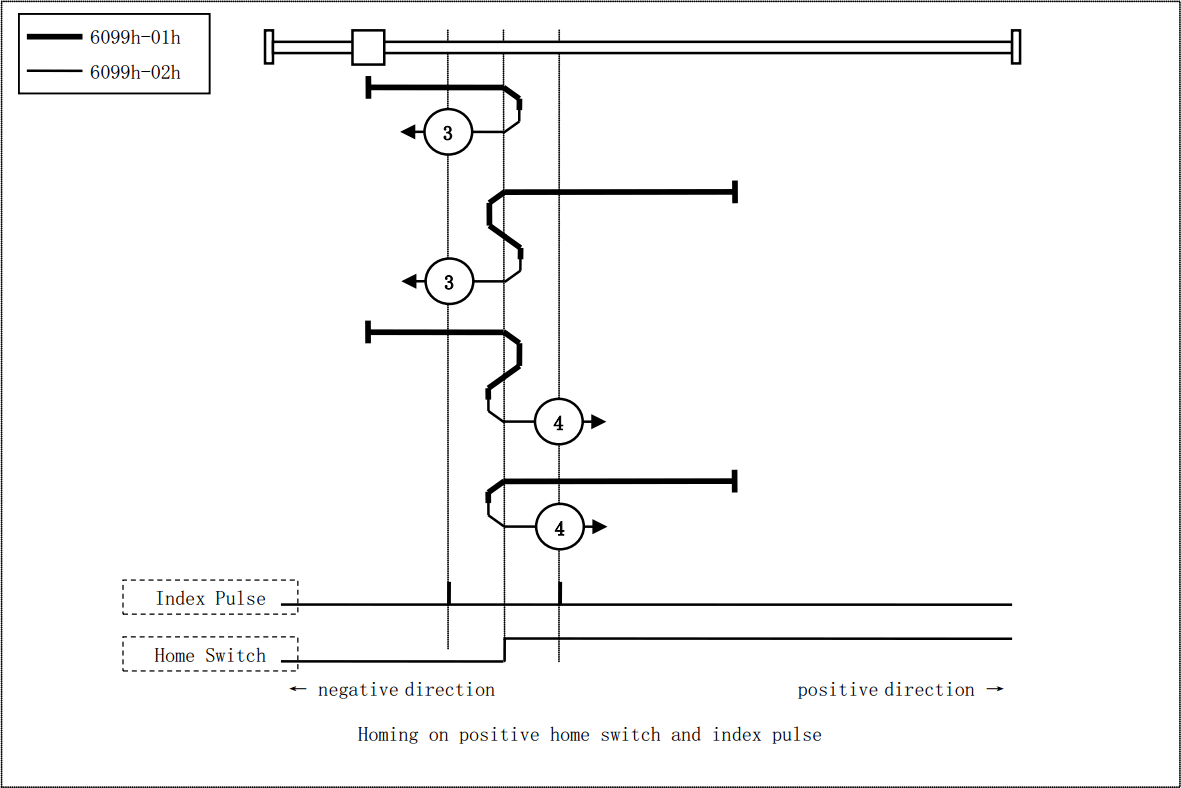
采用原点+Z相回零
1.正向运动 2.找到原点后反向 3.负向运动 4.找Z相 5.完成 |
|
当前在原点 1.负向运动 2.离开原点后反向 3.正向运动 4.找到原点反向 5.负向运动 6.找Z相 7.完成 |
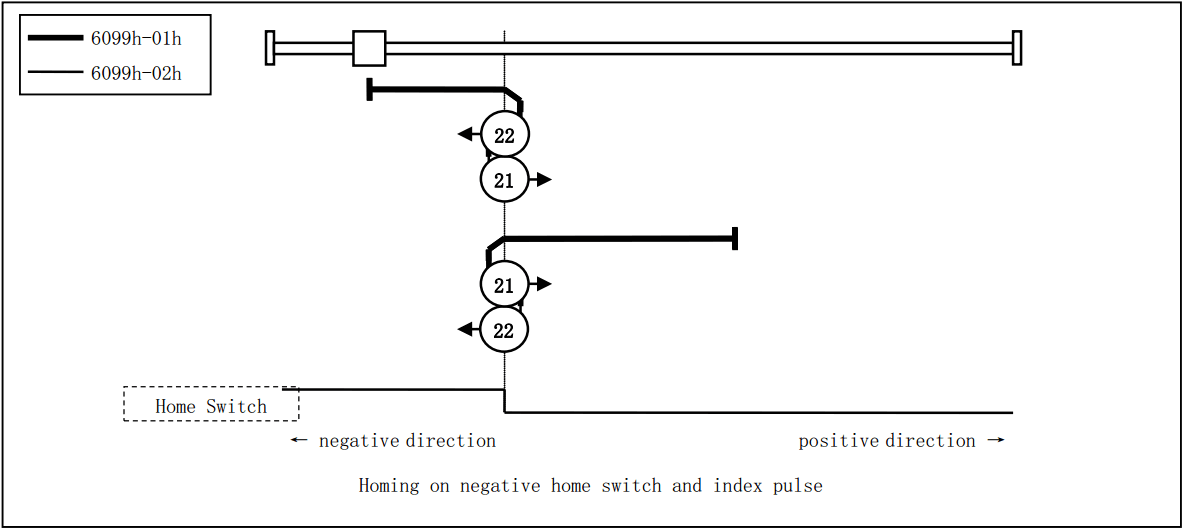
采用原点+Z相回零
| 当前位不在原点 1.正向运动 2.找到原点后反向 3.负向运动 4.离开原点后反向 5.正向运动 6.找Z相 7.完成 |
|
| 当前在原点 1.负向运动 2.离开原点反向 3.正向运动 4.找Z相 6.完成 |
采用原点+Z相回零
| 当前不在原点 1.负向运动 2.找到原点后反向 3.正向运动 4.找Z相 5.完成 |
|
| 当前在原点 1.正向运动 2.离开原点后反向 3.负向运动 4.找到原点后反向 5.正向运动 6.找Z相 7.完成 |
采用原点+Z相回零
| 当前位不在原点 1.负向运动 2.找到原点后反向 3.正向运动 4.离开原点后反向 5.负向运动 6.找Z相 7.完成 |
 |
| 当前在原点 1.正向运动 2.离开原点反向 3.负向运动 4.找Z相 5.完成 |
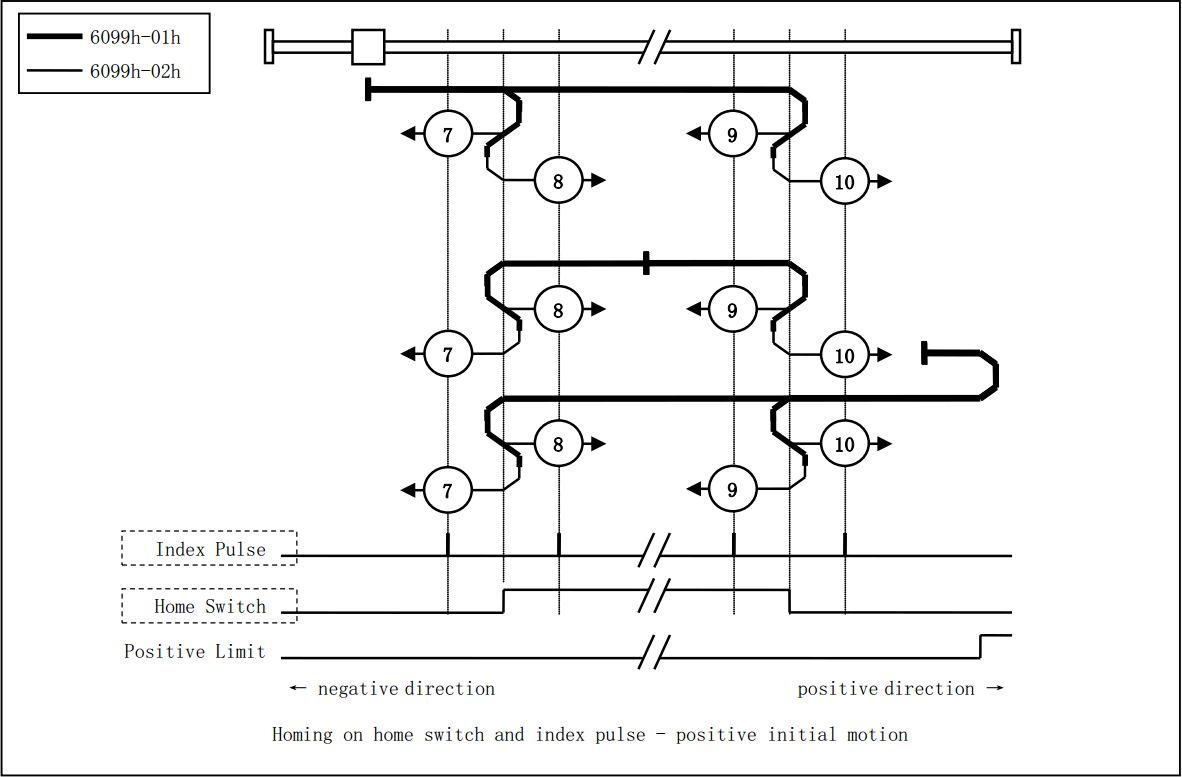
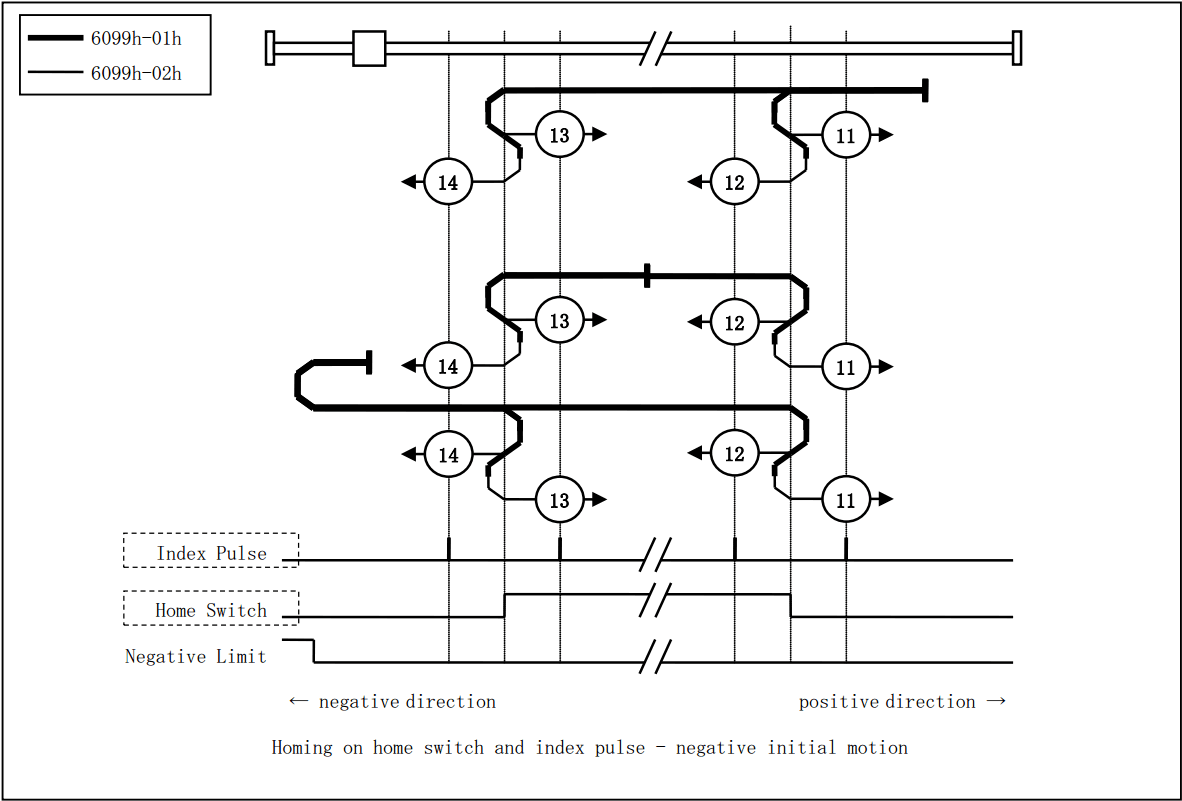
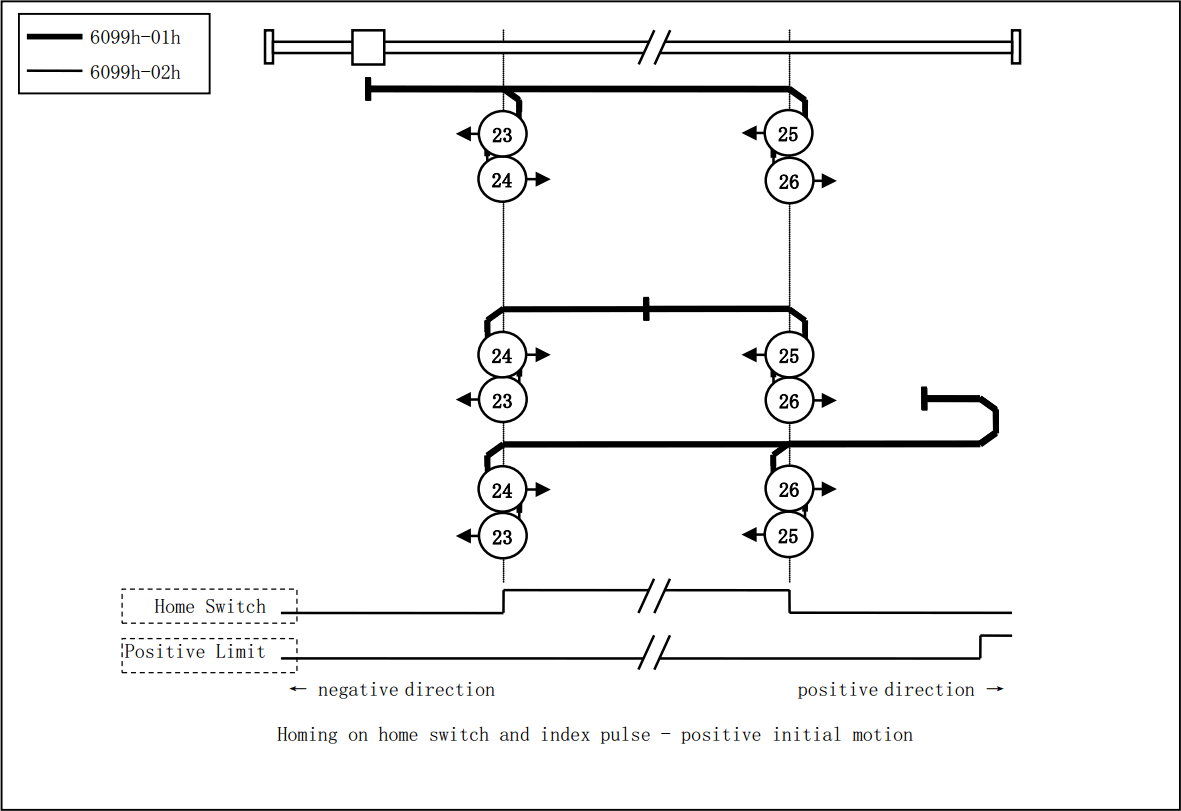
采用原点+正限位+Z相回零
当前在原点左边 1.正向运动 2.找到原点后反向 3.负向运动 4找Z相 5.完成 |
|
当前在原点 1.负向运动 2.离开原点后反向 3.正向运动 4.找到原点反向 5.负向运动 6.找Z相 7.完成
|
 |
当前在原点右边 1.正向运动 2.找到正限位后反向 3.负向运动 4.离开原点后反向 5.正向运动 6.找到原点反向 7.负向运动 5.找Z相 6.完成 |
|
采用原点+正限位+Z相回零
| 当前在原点左边 1.正向运动 2.找到原点后反向 3.负向运动 4.离开原点反向 5.正向运动 6.找Z相 7.完成 |
|
| 当前在原点 1.负向运动 2.离开原点后反向 3.正向运动 4.找到原点后 4.找Z相 5.完成 |
|
| 当前在原点右边 1.正向运动 2.找到正限位后反向 3.负向运动 4.离开原点后反向 5.正向运动 6.找到原点后 7.找Z相 8.完成 |
采用原点+正限位+Z相回零
当前在原点左边 1.正向运动 2.离开原点反向 3负向运动 4.找Z相 5.完成 |
|
当前在原点 1.正向运动 2.离开原点后反向 3.负向运动 4.找到原点后 4.找Z相 5.完成 |
|
当前在原点右边 1.正向运动 2.找到正限位后反向 3.负向运动 4.找到原点后反向 5.正向运动 6.离开原点后反向 7.负向运动 8.找Z相 9.完成 |
采用原点+正限位+Z相回零
当前在原点左边 1.正向运动 2.离开原点后反向 3.负向运动 4.找到原点反向 5.正向运动 6.找Z相 7.完成 |
|
当前在原点 1.正向运动 2.离开原点后反向 3.负向运动 4.找到原点后反向 5.正向运动 6.找Z相 7.完成 |
|
当前在原点右边 1.正向运动 2.找到正限位后反向 3负向运动 4.找到原点后反向 5.正向运动 6离开原点后 7.找Z相 8.完成 |
采用原点+负限位+Z相回零
当前在原点右边 1.负向运动 2.找到原点后反向 3.正向运动 4.离开原点后 5.找Z相 6.完成 |
|
当前在原点 1.正向运动 2.离开原点后反向 3.负向运动 4.找到原点后反向 5.正向运动 6.找Z相 7.完成 |
 |
当前在原点左边 1.负向运动 2.找到负限位后反向 3.正向运动 4.离开原点后反向 5.负向运动 6.找到原点后反向 7.正向运动 8.找Z相 9.完成 |
|
采用原点+负限位+Z相回零
当前在原点右边 1.负向运动 2.找到原点后反向 3.正向运动 4.离开原点后反向 5.负向运动 6.找Z相 7.完成 |
|
当前在原点 1.正向运动 2.离开原点后反向 3. 负向运动 4.找到原点后 5.找Z相 6.完成 |
|
当前在原点左边 1.负向运动 2.找到负限位后反向 3.正向运动 4.离开原点后反向 5.负向运动 6.找到原点后 7.找Z相 8.完成 |
采用原点+负限位+Z相回零
当前在原点右边 1.负向运动 2.离开原点后反向 3.正向运动 4.找到原点后 5.找Z相 6.完成 |
 |
当前在原点 1.负向运动 2.离开原点后反向 3正向运动 4.找到原点后 5.找Z相 6.完成 |
|
当前在原点左边 1.负向运动 2.找到负限位后反向 3.正向运动 4.找到原点后反向 5.负向运动 6.离开原点后反向 7.正向运动 8.找Z相 9.完成 |
采用原点+负限位+Z相回零
当前在原点右边 1.负向运动 2.离开原点后反向 3.正向运动 4.找到原点后反向 5.负向运动 6.找Z相 7.完成 |
|
当前在原点 1.负向运动 2.离开原点后反向 3.正向运动 4.找到原点后反向 5.负向运动 6.找Z相 7.完成 |
|
当前在原点左边 1.负向运动 2.找到负限位后反向 3.正向运动 4.找到原点后反向 5负向运动 6.离开原点后 7.找Z相 8.完成 |
和模式10001类似,不找Z相
和模式10002类似,不找Z相
10019和模式10003类似,不找Z相、10020和模式10004类似,不找Z相
10021和模式10005类似,不找Z相、10022和模式10006类似,不找Z相
10023和模式10007类似,不找Z相、10024和模式10008类似,不找Z相、10025和模式10009类似,不找Z相、10026和模式10010类似,不找Z相
10027和模式10011类似,不找Z相、10028和模式10012类似,不找Z相、10029和模式10013类似,不找Z相、10030和模式10014类似,不找Z相
10033模式 负向运动,找第一个Z相、10034模式 正向运动,找第一个Z相
将当前位置设为电气原点
| 上一页 | 下一页 |