| 上一页 | 下一页 |
运动控制参数全部映射到了R元件寻址空间,每个轴分配1000个R元件,最大支持64轴。在轴寻址空间中,轴没有使用的R元件也可作普通元件使用,对于屏蔽的轴可用D8508~D8511禁止状态刷新。R元件的分配如下所示:
| 轴编号 | 参数起始地址 |
| 0 | R0 |
| 1 | R1000 |
| 2 | R2000 |
| ... | |
| 31 | R31000 |
| 32 | R32000 |
| ... | ... |
| 63 | R63000 |
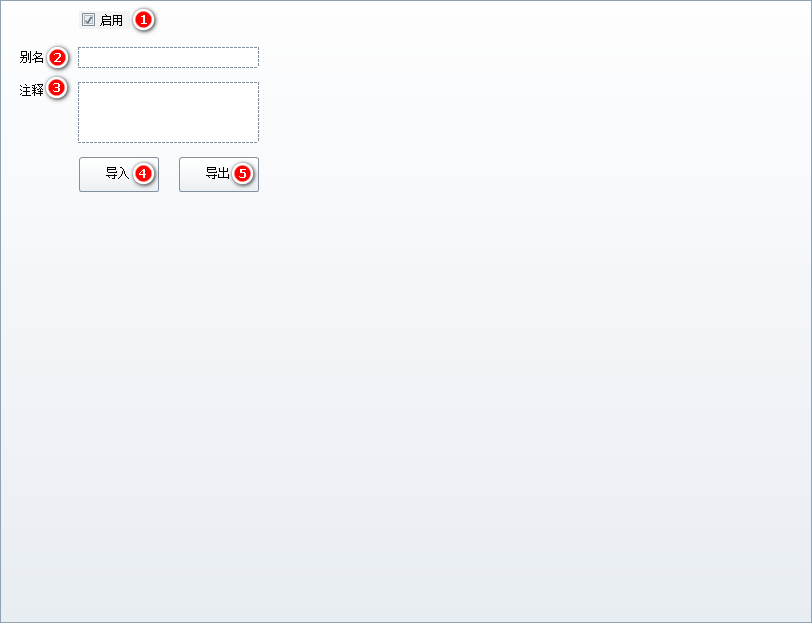
| 1 | 禁止修改。总线模式的轴禁用在总线参数中设置,其他驱动库模式不支持轴禁用功能。 |
| 2 | 别名,可在梯形图中显示。 |
| 3 | 备注说明 |
| 4 | 从备份数据中恢复参数 |
| 5 | 可以将当前设置的轴参数导出,保存到电脑本地,以便其它项目使用,或者作为备份数据用。 |
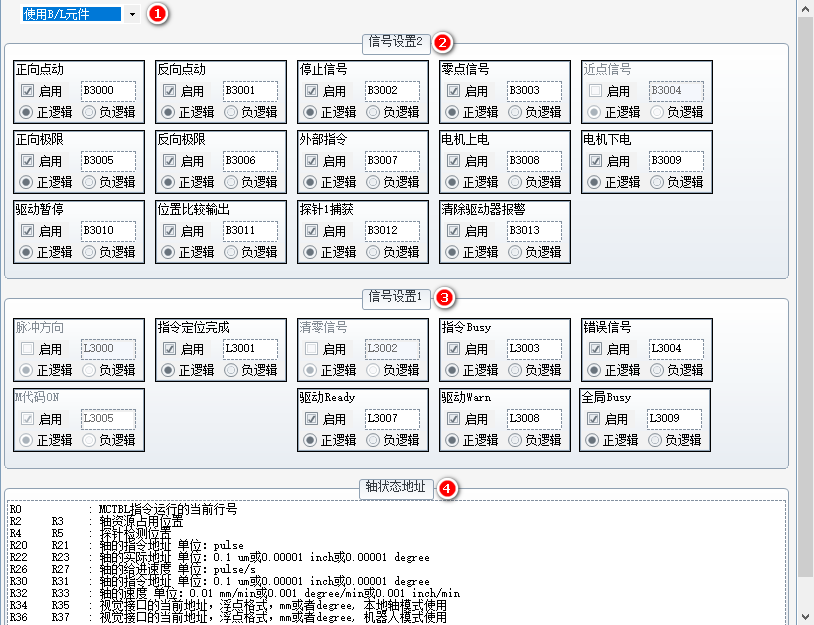
每个轴的各类IO信号都可通过配置界面灵活配置。设置轴相关的输入输出信号,信号设置可选择使用M/XY元件或者B/L元件,M/XY为早期版本使用,新项目建议使用B/L元件。
每个信号设置可以手动输入进行分配,手动选择是正逻辑有效还是负逻辑有效;也可以进行导入,使用默认设置。注意:启用必须勾选,信号才是有效的;不启用的不影响。
轴的输入输出信号可一键恢复到默认配置,操作如下:
点击菜单栏—变换—生成程序框架—初始化轴的IO配置,确定后所有轴的IO配置将恢复到初始状态(初始状态指的是使用B3000/L3000开始的连续地址)。
注意:总线模式下,轴IO信号内部已经和从站映射好,板卡模式下,因各品牌的板卡不一样,部分信号(如常见的限位信号、零点信号、电机上下电信号、报警清除信号、驱动Ready等)可能需要在梯形图中自己手动进行地址映射。
| 正向点动 | 当信号为ON时轴正向运行JOG运动,OFF时减速停止 |
| 反向点动 | 当信号为ON时轴反向运行JOG运动,OFF时减速停止 |
| 停止信号 | 当信号为ON时,停止正在运动的轴 |
| 零点信号 | 轴的零点信号,总线模式通过PDO映射驱动器的603F寄存器 |
| 近点信号 | 旧功能,已弃用 |
| 正向极限 | 软件的正向极限,总线模式通过PDO映射驱动器的603F寄存器 |
| 反向极限 | 软件的反向极限,总线模式通过PDO映射驱动器的603F寄存器 |
| 外部指令 | 保留,功能未实现 |
| 电机上电 | 驱动器使能信号,置ON后,驱动器使能,完成后自动变为OFF |
| 电机下电 | 驱动器去使能信号,置ON后,驱动器去使能,完成后自动变为OFF |
| 运动暂停 | 置ON后立刻暂停当前运动,置OFF后从当前位置继续运动。仅连续轨迹运动有效。 |
| 运动暂停2 | 置ON后路径的下一个过渡点暂停当前运动,置OFF后从当前位置继续运动。仅连续轨迹运动有效。 |
| 位置比较输出 | 旧功能,已弃用 |
| 探针1捕获 | 程序中把此控制位置ON 后,在电机运动中捕获探针信号,完成后自动变为OFF,捕获位置存放在R***4~R***5中;探针选择参考[188]参数。 注意:系统内部使用SDO模式访问探针相关寄存器,请勿将这些寄存器加入到PDO映射中。 |
| 清除驱动器报警 | 置ON时给驱动器发报警复位命令,复位完成后自动变为OFF。不是所有报警都是可复位的,具体可参考驱动器手册 |
| 脉冲方向 | 旧功能,已弃用 |
| 指令定位完成 | 运动指令MCTBL/MCZERO执行完成时置ON,信号持续一个周期。 |
| 清零信号 | 旧功能,已弃用 |
| 指令Busy | 运动指令MCTBL/MCZERO指令运行时为ON,关闭后且轴完全停止后清零 |
| 错误信号 | 运动指令MCTBL/MCZERO运行过程中发生错误,具体错误信息可以点击PLC诊断查看 |
| M代码ON | 旧功能,已弃用 |
| 驱动Ready | 驱动器上电为ON,下电为OFF |
| 驱动Warn | 驱动器有报警发生 |
| 全局Busy | 轴资源在使用时为ON,轴资源释放后为OFF |
| R元件偏移 | 功能 |
| 0 | MCTBL指令执行,指示当前运动的行号 |
| 2,3 | 轴资源占用步号 |
| 4,5 | 探针检测位置 |
| 16 | 速度.位置切换允许标志 |
| 17 | 位置.速度切换允许标志 |
| 20,21 | 轴的规划位置,单位:pulse |
| 22,23 | 轴的反馈位置,根据实际单位定义 |
| 24,25 | 保留 |
| 26,27 | 轴的反馈速度,单位:pulse/s |
| 28,29 | 保留 |
| 30,31 | 轴的规划位置,根据实际单位定义 |
| 32,33 | 轴的规划速度,根据实际单位定义 |
当相机使用到的轴,以下元件为视觉模块使用,请勿做它用
下表以轴0做举例说明,其他轴以此类推。
| B3018 | 轴0增量运动,为ON时启动 |
| B3019 | 轴0绝对运动,为ON时启动 |
| L3009 | 轴0当前状态,运动时置ON,停止时置OFF,本地轴用 |
| L3018 | 轴0当前状态,运动时置ON,停止时置OFF,机器人用 |
| R34 | 轴0当前位置,根据单位定义,本地轴用 |
| R36 | 轴0当前位置,浮点数格式,机器人使用 |
| R198 | 轴0运动命令位置,根据单位定义,本地轴用 |
| R200 | 轴0运动命令位置,浮点数格式,本机器人使用 |
| 上一页 | 下一页 |