ProH: 与ProH进行通讯
机器人:与ProH以外的PLC通讯
9次运动9次图像:轴运动9次,拍照9次。
9次运动1次图像:轴运动9次,拍照1次,运用场合示例:把标定板放在相机下面,相机一次拍完标定板上的9个点,以标定板上的9个点为坐标系标定。
3次运动3次图像:轴运动3次,拍照3次,运用场合示例:相机只能跟XY轴中的一根轴标定时,另外一根轴的标定按照垂直方向推算标定。
0次运动1次图像:轴运动0次,拍照1次
3点靶标:
| 上一页 | 下一页 |
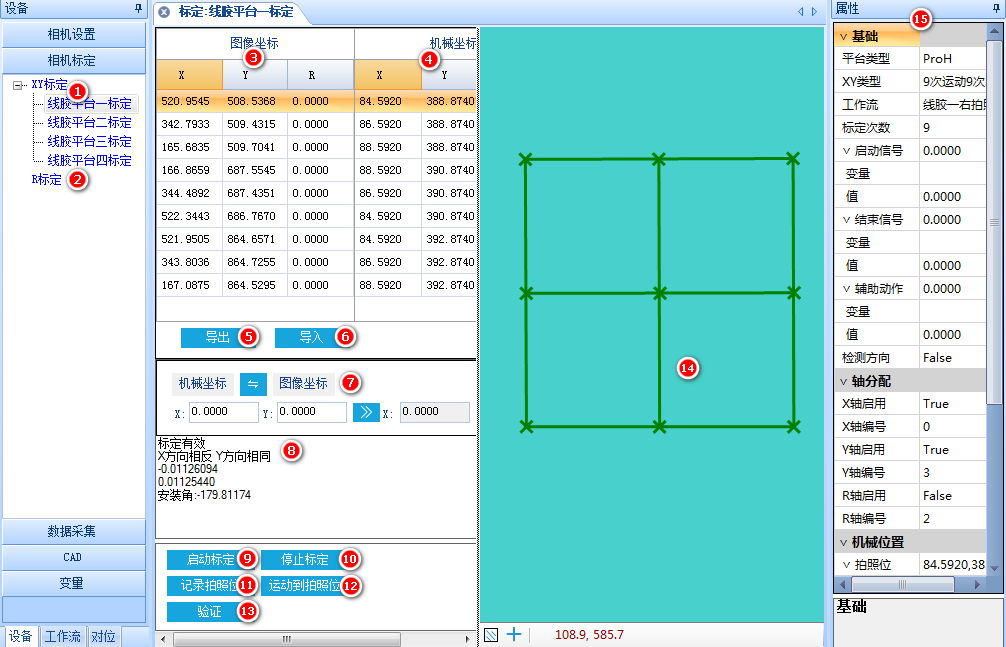
| 1 | XY轴标定列表:鼠标右键点击该区域,根据菜单内容选择需要进行相应操作 |
| 2 | R标定列表:旋转轴的标定列表,鼠标右键点击该区域,根据菜单内容选择需要进行相应操作 |
| 3 | 标定点位的图像坐标 |
| 4 | 标定点位的机械坐标 |
| 5 | 把坐标信息导出到表格 |
| 6 | 把外部的坐标导入当前标定 |
| 7 | 机械坐标与图像坐标的关系相互转换 |
| 8 | 标定结果信息输出 |
| 9 | 启动标定的按钮 |
| 10 | 停止标定的按钮 |
| 11 | 记录拍照位置信息,标定需要在拍照位标定 |
| 12 | 轴运动到记录的拍照位置 |
| 13 | 验证标定的结果,配合【移动量X】及【移动量Y】进行验证,该两项参数可通过属性栏进行配置 |
| 14 | 标定过程的图像显示区域 |
| 15 | 属性栏:配置标定相关参数 |
|
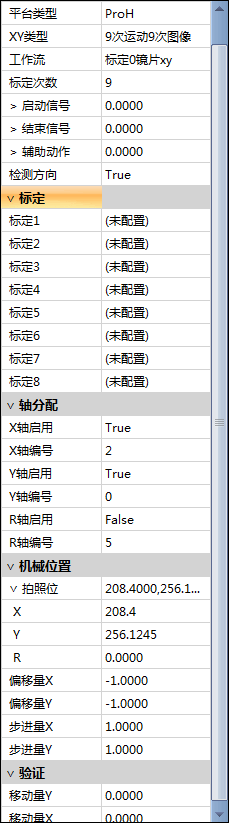
平台类型 | ProH: 与ProH进行通讯 |
| XY类型 | 9次运动9次图像:轴运动9次,拍照9次。 |
|
| 工作流 | 标定时,找标定点的工作流 | |
| 标定次数 | 只在R标定时选择R类型:“旋转多点拟合多次图像“生效 | |
| 启动信号 | 通过VD启动标定,VD值0→1启动 | |
| 结束信号 | 标定结束信号,OK写1,NG写2 | |
| 辅助动作 | 辅助标定的动作-机构不满足直接运动标定,这时中间会加一个辅助动作,通过填的变量判断辅助动作的完成 | |
| 检测方向 | true-标定方向不一致,标定完成系统信息会有提示 | |
| 标定 | 应用于多相机同时标定,最多支持8个相机同时标定。多个标定的启动信号通过标定1中配置的标定文件控制。 | |
| 轴分配 | 标定时运动的轴的序号 | |
| 拍照位 | 相机的拍照位,点击记录拍照位即可写入 | |
| 偏移量XY | 通过调整偏移量确定标定的第一个点的位置 | |
| 步进量XY | X、Y轴标定每次运动的量 | |
| 移动量XY | 验证标定结果时,验证X、Y轴移动的量,是视觉拍照测量的数据是否一致 |
参考运动模块元件定义。
1.添加相机
(1)打开相机配置界面,添加好相机;
(2)配置好相机参数,包括但不限于: 制造商、序列号、相机拍照方式、相机镜像旋转,其中
相机拍照方式:软件触发及外部IO触发拍照。
相机镜像旋转:将相机成像的方向和运动轴的方向设置成一致。
2.连接相机
(1)【打开】相机;
(2)点击【连续采集】,相机即可采图。
3.相机标定
XY标定:
(1)新建XY标定;
(2)配置好标定参数;
(3)【记录拍照位】
(4)【启动标定】
标定完成,系统信息栏有提示。注意:标定完成需要保证X方向相同,Y方向相同。
R标定(求旋转中心):其操作步骤与【XY标定】相同,不同的是这里创建的是【R标定】。
标定完成,系统信息栏有提示。
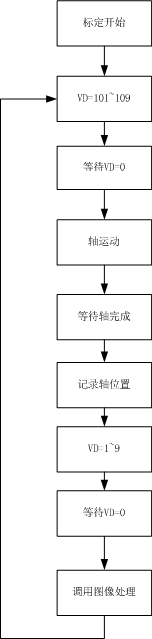 |
(1)当轴与相机标定,相机通过拍轴上的一个产品标定,但是机构不满足相机直接采集到标定的产品,需要通过辅助动作,来帮助把标定的工件搬运到相机的视野下。 |
| (2)辅助动作中填的变量需映射 VD 元件,变量操作需设为“读取”。 | |
(3)辅助动作标定的流程如左图。说明:当启动标定开始时,视觉会把VD元件赋值为101,说明第一个辅助动作在执行中如气缸动作等,完成辅助动作后梯形图程序把VD元件赋值为0告诉视觉辅助动作完成,完成后相机关联的轴开始运动,到位后记录位置视觉自动记录,记录完成后视觉会再把VD元件赋值1,当梯形图程序再把VD元件赋值为0时表示相机拍照,如此反复标完九个点。 |
| 上一页 | 下一页 |