| 上一页 | 下一页 |
| ProU卡偏移 | XMEN-XX | 点数量 | 功能 |
| X00~X37 | X00~X37 | 32 | 通用输入(高速)X0-X17可当作轴的Z相信号,用作 回零使用,X30-37可用作编码器输入,对应四组编码器。 |
| ProU卡偏移 | XMEN-XX | 点数量 | 功能 |
| Y00~Y037 | Y00~Y037 | 32 | 通用输出(高速)Y0-Y16可发脉冲,Y20-Y27固定对应Y0-Y16的方向。不使用脉冲输出时IO可当作普通输出使用 |
限位原点需要手动映射到轴 "输入输出"中配置的元件中,可以用总线的IO,也可以用脉冲卡的IO。
注:限位或原点当做探针用,必须接在脉冲卡X00~X17上。
| ProU选择回原 | 对应回原 |
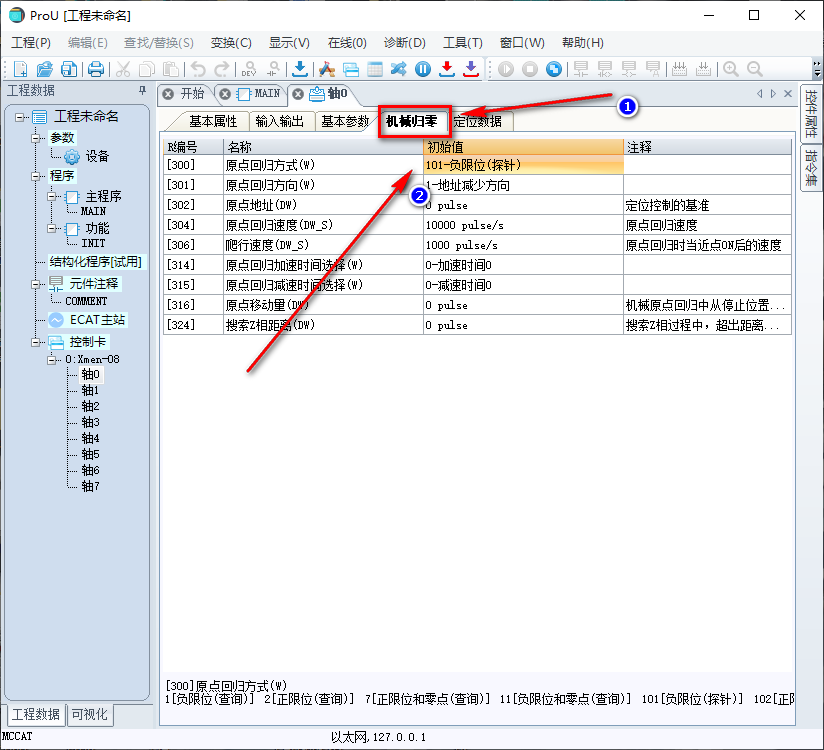
| 101 | 负限位+探针(一般是原点感应器当探针信号,此模式至少需要负限位,探针两个感应器) |
| 102 | 正限位+探针(一般是原点感应器当探针信号,此模式至少需要正限位,探针两个感应器) |
| 107 | 正限位+零点+探针(此模式至少需要正限位,零点,探针三个感应器) |
| 111 | 负限位+零点+探针(此模式至少需要负限位,零点,探针三个感应器) |
| 133 | 负方向直接找探针(一般是原点感应器当探针信号,此模式至少需要探针这一个感应器) |
| 134 | 正方向直接找探针(一般是原点感应器当探针信号,此模式至少需要探针这一个感应器) |
1.脉冲卡上的X0-X17是探针信号,接线必须要接在这16个点上(注意感应器一般是你的原点感应器,如果使用了原点感应器,那么回原模式直接用101,102即可)。
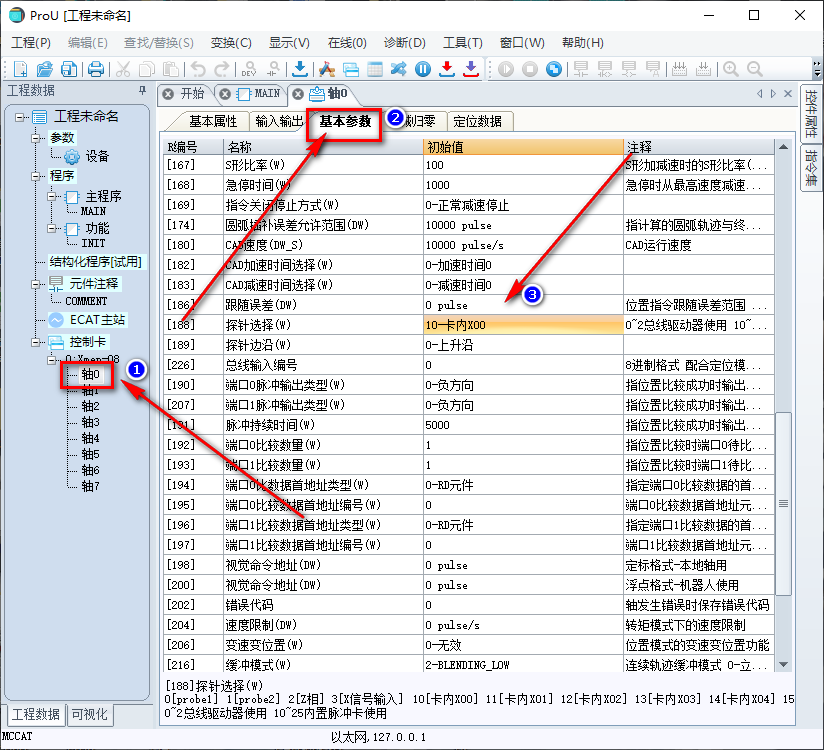
2.设置基本参数“探针选择”R188,设置你的探针信号来源。
3.设置回原模式选择101-134号模式,速度可以比较快,不需要设置成很慢。
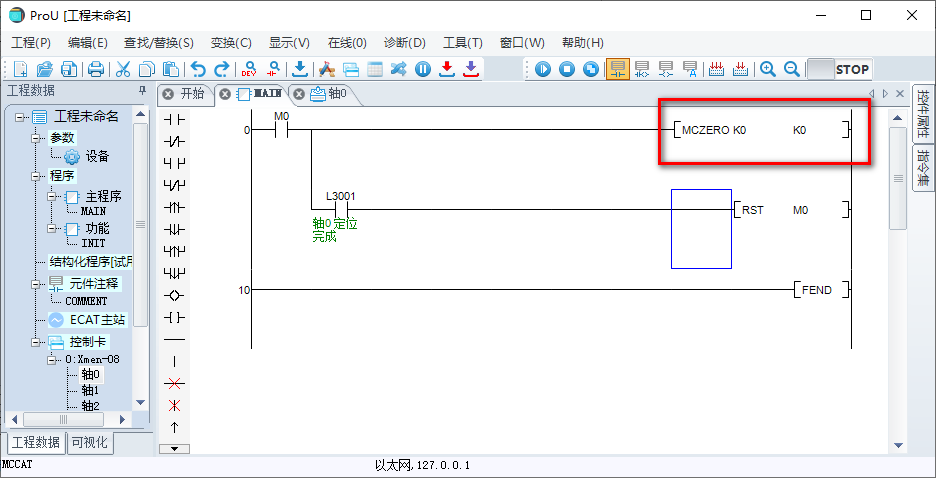
4.启动回原指令即可(MCZERO指令)。
| ProU可使用 |
| 1轴ABS定位 |
| 1轴INC定位 |
| 1轴速度模式正转 |
| 1轴速度模式反转 |
| 寄存器 | 对应数据 |
| Ux\G0 | X0高速计数值 |
| Ux\G2 | X1高速计数值 |
| Ux\G4 | X2高速计数值 |
| Ux\G6 | X3高速计数值 |
| Ux\G8 | X4高速计数值 |
| Ux\G10 | X5高速计数值 |
| Ux\G12 | X6高速计数值 |
| Ux\G14 | X7高速计数值 |
| Ux\G16 | X8高速计数值 |
| Ux\G18 | X9高速计数值 |
| Ux\G20 | X10高速计数值 |
| Ux\G22 | X11高速计数值 |
| Ux\G24 | X12高速计数值 |
| Ux\G26 | X13高速计数值 |
| Ux\G28 | X14高速计数值 |
| Ux\G30 | X15高速计数值 |
| Ux\G32 | X16高速计数值 |
| Ux\G34 | X17高速计数值 |
| Ux\G36 | X18高速计数值 |
| Ux\G38 | X19高速计数值 |
| Ux\G40 | X20高速计数值 |
| Ux\G42 | X21高速计数值 |
| Ux\G44 | X22高速计数值 |
| Ux\G46 | X23高速计数值 |
| Ux\G48 | X24高速计数值 |
| Ux\G50 | X25高速计数值 |
| Ux\G52 | X26高速计数值 |
| Ux\G54 | X27高速计数值 |
| Ux\G56 | X28高速计数值 |
| Ux\G58 | X29高速计数值 |
| Ux\G60 | X30高速计数值 |
| Ux\G62 | X31高速计数值 |
注意:编码器只有四路,编码器脉冲输入X30,X31为第一路,X32,X33为第二路,以此类推。
| 寄存器 | 对应数据 | 参数 |
| Un\G100 | 编码器x清零 | 1=清零,软件自动复位为0 |
| Un\G102 | 编码器x当前值 | 编码器当前位置 |
| Un\G104 | 编码器x模式选择 | 0=AB相计数,1=BA相计数,2=A单相计数,B为方向 |
| Un\G106 | 备用 | 备用 |
| Un\G108 | 备用 | 备用 |
| Un\G120 | 捕获器x启动 | 1 = 启动捕获,0 = 停止捕获 |
| Un\G122 | 捕获器x触发IO | 范围:0-15 |
| Un\G124 | 捕获值 | |
| Un\G126 | 数量 | 捕获数量 |
| Un\G128 | 捕获状态 | 0=正常,1=溢出 |
| Un\G160 | 比较器X启动停止 | 0=停止,1=启动(固定位置模式每次比较前需要0->1) |
| Un\G162 | 比较器x比较数量 | 线性模式下值为0代表无限数量,固定模式最大数量为15 |
| Un\G164 | 比较器x剩下的数量 | 只读 (在先进先出模式中,判断该寄存器大于14后不可继续写数据,待比较了部分位置后,剩余数量减少到14以下时才可继续在比较过程中往缓冲区中继续塞入比较位置) |
| Un\G166 | 比较器模式选择 | 0=固定位置模式,1=线性模式,2=先进先出模式 |
| Un\G168 | 备用 | |
| Un\G170 | 比较器x输出口 | 范围:0-15(代表脉冲卡的Y0-Y17) 注意:比较器启动时,选择的输出口无法通过plc启用。 |
| Un\G172 | 比较器x输出口逻辑 | 0=默认电平,1=电平翻转 |
| Un\G174 | 比较器x输出口宽度 | 单位10us |
| Un\G176 | 备用 | |
| Un\G178 | 备用 | |
| Un\G200 | 比较器x位置1 | (线性模式下,这个为起始比较位置)
|
| Un\G202 | 比较器x位置2 | (线性模式下,这个为每一段间距地址)
|
| Un\G204 | 比较器x位置3 | |
| Un\G206 | 比较器x位置4 | |
| Un\G208 | 比较器x位置5 | |
| Un\G200 | 比较器x位置6 | |
| Un\G212 | 比较器x位置7 | |
| Un\G214 | 比较器x位置8 | |
| Un\G216 | 比较器x位置9 | |
| Un\G218 | 比较器x位置10 | |
| Un\G220 | 比较器x位置11 | |
| Un\G222 | 比较器x位置12 | |
| Un\G224 | 比较器x位置13 | |
| Un\G226 | 比较器x位置14 | |
| Un\G228 | 比较器x位置15 |
注意1:Un中的n为站号,如果只有一张XMEN卡则,站号为0,如果加了两个ECAT从站则站号为2,以此类推
注意2:编码器共有4个,G100为第一个编码器的起始,下一个编码器对应的起始为G300,每次往后推200.
注意3:编码器的速度最大为200K,超过200K的速度可能导致脉冲丢失。
比较器模式说明:
1.固定位置模式:
1.该模式最多比较15个位置,每次启动时会先比较“位置0”的位置,然后比较“位置1”的位置,比较完之后需要重新启动比较功能,先停止比较功能后再启动比较。
2.线性模式:
1.该模式的G162(比较数量最大为15,但是设置为0时为无限数量),G200为起始比较点,然后会已G202的间距连续的比较。
3.先进先出模式:
1.该模式最大的特点是可以在比较过程中连续不断的往里面塞比较数据。判断G164寄存器大于14后不可继续写数据,待比较了部分位置后,剩余数量减少到14以下时才可继续在比较过程中往缓冲区中继续塞入比较位置
2.写入缓冲器的方法为:判断G202为0时,往G200中先将位置写进去,再把G202写1,待软件后台自动将G202写成0后就写入成功了。
实现飞拍的顺序
1.首先将编码器的接口接到XMEN的IO口上,X30,X31为第一组编码器,如果是差分信号看飞拍接线图。
2.设置编码器模式Un\G104(0=AB相计数,1=BA相计数,2=A单相计数,B为方向),然后转动电机查看Un\G102(编码器当前值)是否有变化,转一圈编码器值是否能对上,注意轴回原之后记得把Un\G100写1把编码器值也清零。
3.
设置比较输出口,脉宽,逻辑,然后设置比较器的模式。我们已固定位置模式为例,将Un\G166设置为0,然后设置需要比较的数量(最多15个),然后设置比较值。Un\G200地址开始依次设置,内部采用的先进先出的方式,依次比较,所以位置必须往一个方向累计增大或者减少,否则就可能比较失败。
4。全部设置好之后需要飞拍时就可以将比较器启动停止(Un\G160)设置成1,比较结束后必须设置为0,下次启动时再重新设置成1.
位置比较的效果
--脉冲卡内部有一个FPGA,我们把编码器接到FPGA上,FPGA会根据设置的位置进行高速比较,所以我们位置比较的精度是编码器一个脉冲。
位置比较的优势
--
比较精度高,适合高速对位的设备
--比较模式多样性,能满足大部分的比较设备。
| 上一页 | 下一页 |