| 上一页 | 下一页 |
设置commode=1,选择ethercat总线模式
设置fbitprd和fbitidx插补周期
tmturnreset 清除绝对值编码器报警, 绝对值模式下用35号回零后,需要下发save命令保存参数。
改变转动方向:mphase 减少180,mdir取
反
Sktumreset:清除三协编码器多圈位置
MOVESMOOTHSRC:15启用输入平滑功能
MOVESMOOTHAVG:平均值滤波
用FreeRun模式时,启动参数中60C2:1=1;60C2:2=0
用DC模式时,启动参数中60C2:1=1;60C2:2=-3
电子齿轮设置6092:01, 设为10000,表示10000个脉冲转一圈。
找Z相回零,推荐把3722:00置1,3504:00参数置1
利用驱动器自身回零功能回零时,电机回到原点附近0.2mm左右的位置,给不出完成信号,也没有震荡现象,如果此时把回原点指令切断或关软件,则会发生猛烈的飞车现象。
强烈建议使用上位机探针式回零,规避上述问题。
由于台达和其他品牌的速度单位不一致,ProH内部做了单位换算,使用时要求驱动器设置为1280000脉冲一圈,而且参数P1-1 都选C。
伺服版本要求: H0101=116 H0100=105.3
伺服参数要求:H0C29=1,采用SM2同步
问题现象:点动没有开启微距的时候,点动再切换回零时,后面就不能点动。
解决方案1.需要在回零前复位6040第8位,2.回零改用上位机。
定位的时候启动速度(R106)需要设置大一点,才能定位。
说明文档P186页,是ProU到IAI的控制信号说明,有16个8位寄存器。
说明文档P192页,是IAI到ProU的状态寄存器,有16个8位寄存器。
RS2系列:
启用CSP,开DC时,需要把启动参数第一行参数的值改为1。
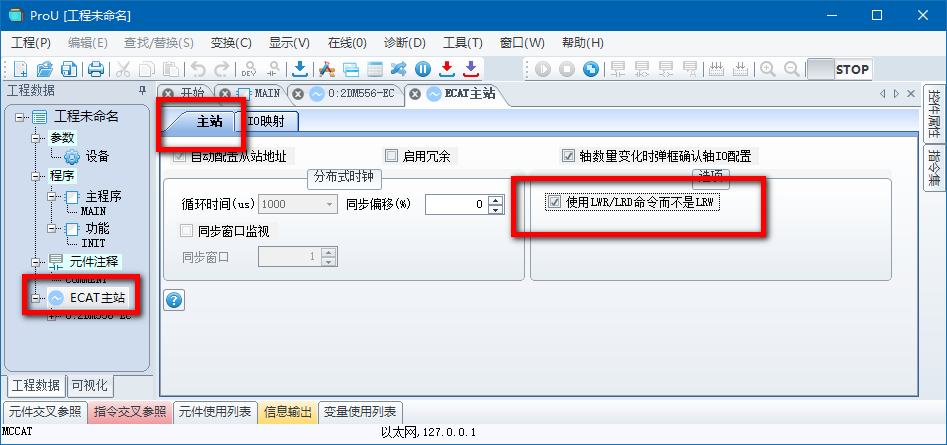
使用安川总线伺服必须用LWR\LRD命令,双击ECAT主站,然后把勾打上就可以了
P4.07 设置为1ms
P4.08 设置为DC mode
P4.10 设置为总线输入
问题:驱动器CSP模式下定位到限位后,伺服跟控制器会有一个固定的误差,导致无法到位。
解决方式:
1.回原使用驱动器回原,切换到HM模式后再执行回原函数,回原完成后切换到CSP模式。(切换模式后判断模式是否切换成功)
| 上一页 | 下一页 |