| 上一页 | 下一页 |
| 序号 | 类型 | 可输入参数 | 说明 |
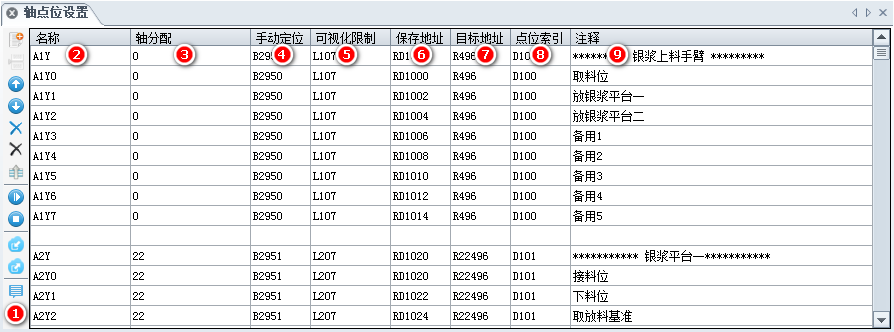
| 2 | 名称 | 以英文开头中间可数字,必须英文结尾。最大长度:8 | 对应在可视化界面输入名称,可以索引对应参数 |
| 3 | 轴分配 | 打勾选择 | |
| 4 | 手动定位 | X、Y、M、S、B、L、F | 在可视化界面,触发定位按钮后,对应位元件值=1,如B2203=1,供程序逻辑处理。 对应位元件值=1,后需要在程序上面将其复位,或者再次触发定位按钮取反复位 |
| 5 | 可视化限制 | X、Y、M、S、B、L、F | 对应位元件值=1,如L107=1,则可视化控件呈灰阶效果,按钮被限制不能够触发 |
| 6 | 保存地址 | D、R、RD、VD | 将选定轴的当前位置如R22,R1022,R2022,R3022通过可视化按钮,保存至RD0后的寄存器,如点位获取1保存地址是RD0,RD2,RD4;点位获取2保存地址是RD6,RD8,RD10; |
| 7 | 目标地址 | D、R、RD、VD | 将轴位置的保存地址的点位数据通过点位索引传送至目标位置,如索引值D100=2则将RD6,RD8,RD10保存至目标地址(示例目标地址为轴系统定位地址)R496,R1496,R2496,R3496; 也可以填写非轴系统定位地址,目标地址如D3100,则将RD6,RD8,RD10保存至目标地址D3100,D3102,D3104 |
| 8 | 点位索引 | D、R、RD、VD | 在可视化界面,触发相应的定位按钮后,如定位2,点位索引D100=2; 或者在程序里面直接给点位索引赋值。 改变其数值,会将指定序号的值传至目标地址,如给点位索引D100=2,则将RD6,RD8,RD10传送至R496,R1496,R2496; |
| 9 | 注释 | 字符 |
| 添加 | |
| 插入 | |
| 向上移动 | |
| 向下移动 | |
| 册除 | |
| 册除所有 | |
| 按变量名称排列 | |
| 监视开始 | |
| 监视停止 | |
| 从 csv 文件导入 | |
| 导出成 csv 文件 | |
| 注释显示 |
3.1轴位置控件在ProU可视化中编辑显示

| 序号 | 类型 | 可输入参数 | 说明 |
| 1 | 点位名称 | 英文、数字 | 对应轴位置程序模板起始名称 |
| 2 | 开始序号 | 数字 | 指定轴位置程序模板开始的序号 |
| 3 | 点位数量 | 数字 | 指定轴位置程序模板显示的点位数量 |
3.2 轴位置控件在 ProH 中显示
| 序号 | 类型 | 可输入参数 | 说明 |
| 1 | 点位名称 | 1、对应轴位置程序模板注释 |
|
| 2 | 保存地址 | 数值 | 1、对应轴位置程序模板表格的保存地址 |
| 3 | 手动定位 | 1、对应轴位置程序模板的手动定位 |
| 上一页 | 下一页 |